





























Goodrive350-19 series VFD Operating
- 166 -
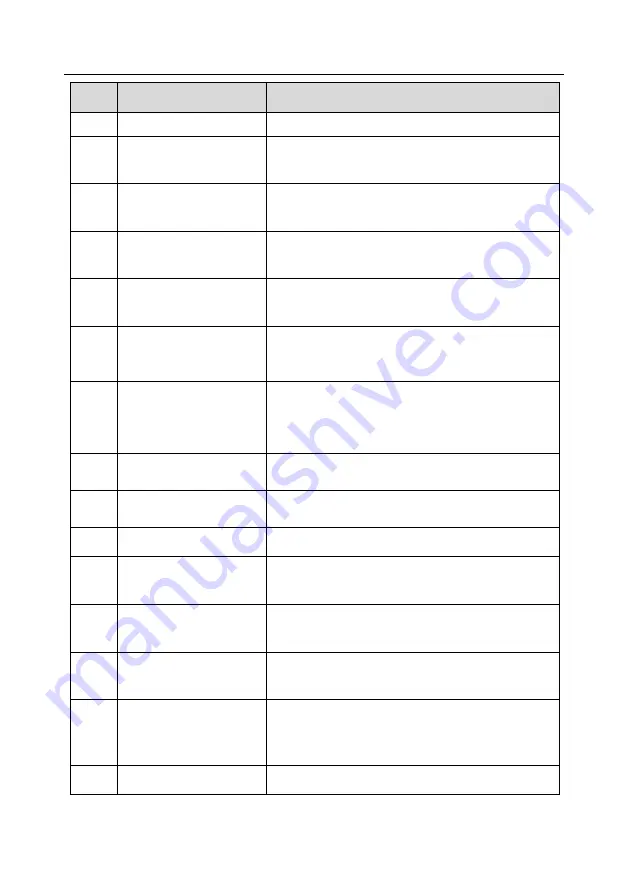
Setting
Function
Description
emergency stop as per the time set by P01.26.
57
Motor over-temperature
fault input
Motor stops at motor over-temperature fault input.
59
FVC switches to V/F control
When this terminal is valid in stop state, switch to
SVPWM control.
60
Switch to FVC control
When this terminal is valid in stop state, switch to
closed-loop vector control.
61
PID polarity switch-over
Switching the output polarity of PID, this terminal should
be used in conjunction with P09.03
62
Switch to SVC1 control
(open-loop vector control
mode 1)
Switching from closed-loop vector control to open-loop
vector control
63
Enable servo
When the thousands place in P21.00 is set to enable
servo, the servo enabling terminal is valid. If the VFD is
managed to enter zero servo control, at this time, no start
command is needed.
64
FWD position limit
Forward rotation position limit for stop. When receiving
this signal during forward rotation, the VFD stops.
65
REV position limit
Reverse rotation position limit for stop. When receiving
this signal during reverse rotation, the VFD stops.
66
Clear the encoder counting Zero out the position counting value
67
Pulse increase
When the terminal function is valid, the pulse input is
increased according to the P21.27 pulse speed.
68
Enable pulse
superimposition
When the pulse superimposition is enabled, pulse
increase and pulse decrease are effective.
69
Pulse decrease
When the terminal function is valid, the pulse input is
decreased according to the P21.27 pulse speed.
70
Electronic gear selection
When the terminal is valid, the proportional numerator is
switched to the P21.30 numerator of the 2
nd
command
ratio.
71
Switch to the master
When the terminal is valid, the switchover from the slave







































































