





























16 - 8
16.4 Robot controller Side Settings
16.4.2
Connecting to robot controller (CRnD-700)
This section describes the settings of a GOT and a robot controller in the following case of system configuration.
POINT
POINT
POINT
Robot controller (CRnD-700)
For details of the robot controller (CRnD-700), refer to the following manual.
CRnD-700 SET UP MANUAL
■1.
System configuration
■2.
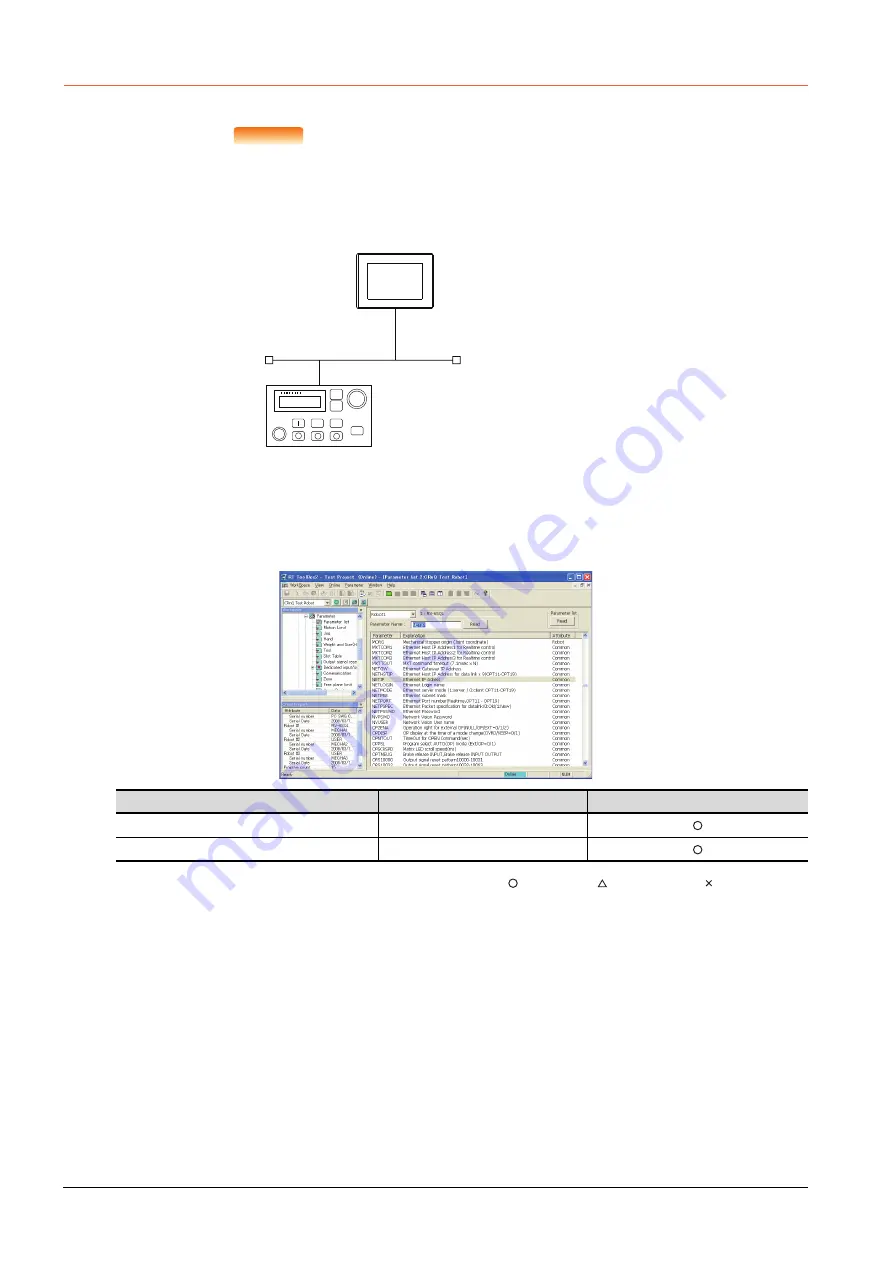
Parameter settings for CRnD-700
(1) For RT ToolBox2
: Necessary : As necessary : Not necessary
Item
Set value
Setting necessity at GOT connection
NETIP
192.168.0.19
GOTPORT
5001
<GOT> (The settings other than the
following are set to the default)
Network No.
: 1
PLC No.
: 1
IP address
: 192.168.0.18
Port No.
: 5001
Communication format : UDP (fixed)
Network No.
: 1
PLC No.
: 2
IP address
: 192.168.0.19
Port No.
: 5001
Communication format
: UDP(fixed)
<CRnD-700> (The settings other than the
following are set to the default)
Summary of Contents for GOT2000 Series
Page 2: ......
Page 84: ......
Page 432: ...6 58 6 6 Precautions ...
Page 578: ...9 54 9 6 Precautions ...
Page 726: ...12 84 12 5 Precautions ...
Page 756: ......
Page 822: ...14 66 14 4 Device Range that Can Be Set ...
Page 918: ...15 96 15 7 Precautions ...
Page 930: ...16 12 16 6 Precautions ...
Page 964: ......
Page 1002: ...19 38 19 7 Precautions ...
Page 1022: ...20 20 20 5 Precautions ...
Page 1023: ...MULTI CHANNEL FUNCTION 21 MULTI CHANNEL FUNCTION 21 1 ...
Page 1024: ......
Page 1054: ...21 30 21 5 Multi channel Function Check Sheet ...
Page 1055: ...FA TRANSPARENT FUNCTION 22 FA TRANSPARENT FUNCTION 22 1 ...
Page 1056: ......
Page 1223: ......







































































