





























Goodrive350A series high-performance multifunction VFD
Function parameter list
-260-
Function
code
Name
Description
Default
value
Modify
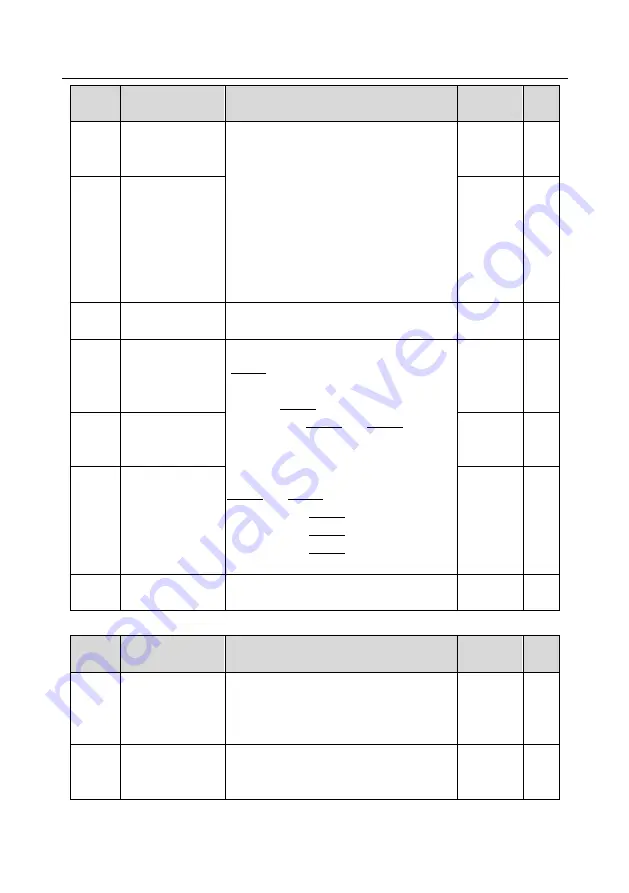
P23.09
Current-loop
proportional
coefficient P
Note:
1. These two parameters are used to adjust PI
parameters of current loop; it affects dynamic
response speed and control precision of the
system directly. The default value needs no
adjustment under common conditions;
2. Applicable to SVC mode 0 (P00.00=0),
SVC mode 1 (P00.00=1), and FVC
(P00.00=3)
Setting range: 0
–65535
1000
○
P23.10
Current-loop
integral coefficient I
1000
○
P23.11
Speed-loop
differential gain
0.00
–10.00s
0.00s
○
P23.12
High-frequency
current-loop
proportional
coefficient
In the closed-loop vector control mode
(P00.00=3), when the frequency is lower than
the current-loop high-frequency switching
threshold (P23.14), the current-loop PI
parameters are P23.09 and P23.10; and
when the frequency is higher than the
current-loop high-frequency switching
threshold, the current-loop PI parameters are
Setting range of P23.12: 0
–65535
Setting range of P23.13: 0
–65535
Setting range of P23.14: 0.0
–100.0% (of the
max. frequency)
1000
○
P23.13
High-frequency
current-loop integral
coefficient
1000
○
P23.14
Current-loop
high-frequency
switching threshold
100.0%
○
P23.15
–
P23.19
Reserved
P24
—
Encoder of motor 2
Function
code
Name
Description
Default
value
Modify
P24.00
Encoder type
display
0: Incremental encoder
1: Resolver-type encoder
2: Sin/Cos encoder
3: Endat absolute encoder
0
●
P24.01
Encoder pulse
number
Number of pulses generated when the
encoder revolves for one circle.
Setting range: 0
–60000
1024
◎







































































