





























597
Program Example
Section 10-1
Explanation of the
program
01) A program No. and axes to be used are specified.
02) The gear ratio of 1 to 2 is set.
03) The master axis moves to the position 50000 at 500 rpm. (The slave syn-
chronizes to the master and moves at 250 rpm.)
04) The operation is held for 3 seconds.
05) The gear ratio of 1 to 1 is set.
06) The master axis moves to the position 100000 at 500 rpm. (The slave
synchronizes to the master and moves at 500 rpm.)
07) The operation is held for 3 seconds.
08) The gear ratio of 2 to 1 is set.
09) The master axis moves to the position 150000 at 500 rpm. (The slave
synchronizes to the master and moves at 1000 rpm.)
10) The operation is held for 3 seconds.
11) The synchronization is canceled.
12) The axes return to the origin.
13) The program is completed.
10-1-21 Trailing Synchronization/Synchronization Cancel (SYNC/SYNCR)
Explanation of the
operation
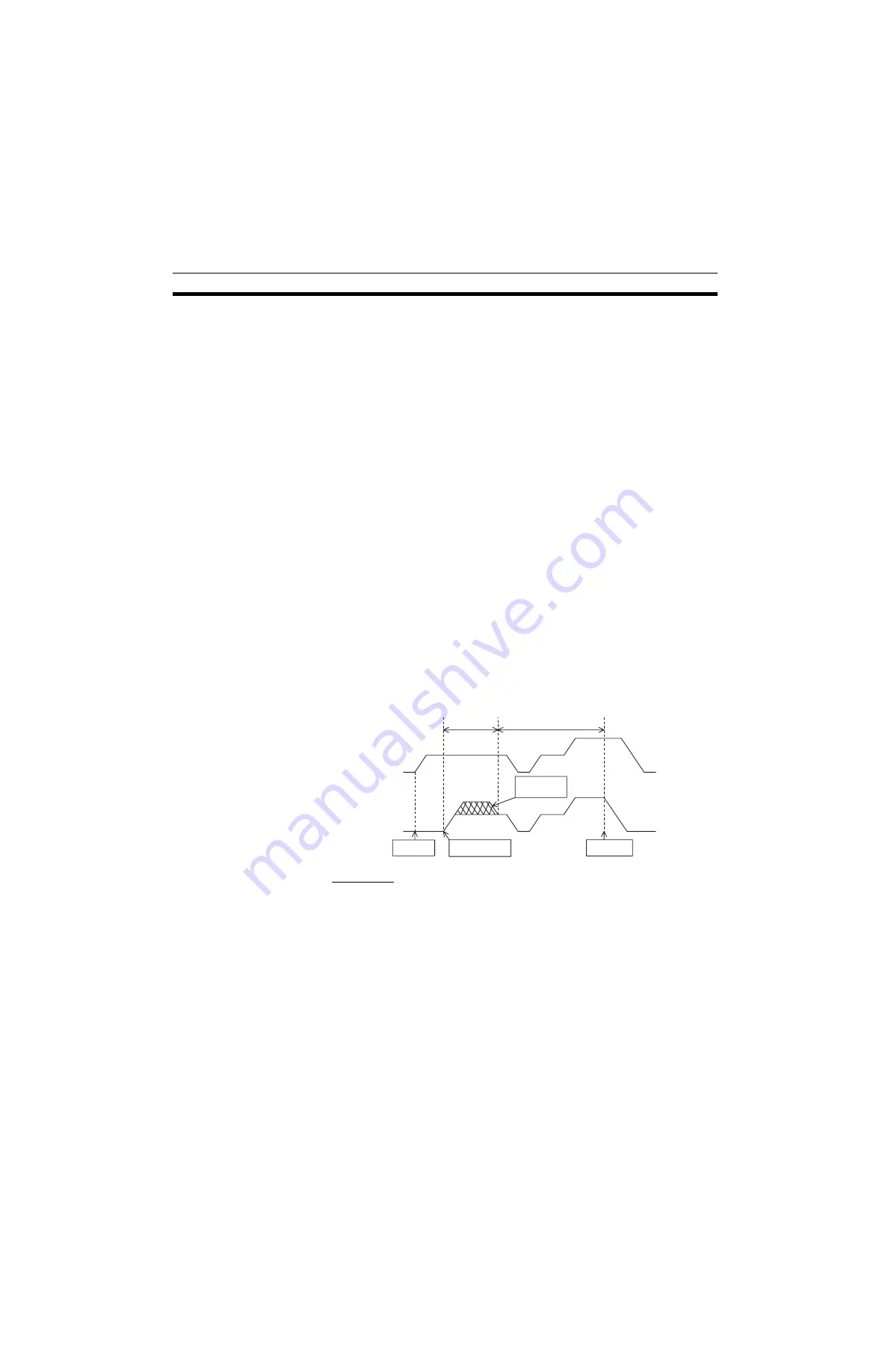
• The slave axis will start trailing the master axis when the marker sensor
(external input) turns ON. When it catches up with the master axis, syn-
chronization with the ratio of 1 to 1 will be performed.
• In this example, trailing synchronization is performed with the slave exe-
cuted by the motion task 1 and the master executed by the motion task 2.
(The program starts the slave first, and then the master.)
Program 1
(Slave axis)
01) PROG P023 Q00000002;
02) SYNC [J02]5000 [J01]10000;
03) WAIT #SL0202 > = 80000;
04) SYNCR [J02];
05) WAIT #ML0000 = = 1;
06) MOVEL [J02]0 F500000;
07) END;
Trailing
interval
Trailing synchronization
interval
Master axis
Slave axis
SYNC
command
Marker
sensor ON
SYNCR
command
Travel distance
for trailing
Summary of Contents for CS1W-MCH71 -
Page 2: ...CS1W MCH71 CJ1W MCH71 Motion Control Unit Operation Manual Revised June 2008 ...
Page 3: ...iv ...
Page 29: ...xxx ...
Page 33: ...xxxiv ...
Page 35: ...xxxvi ...
Page 39: ...xl ...
Page 69: ...24 Performance Section 1 7 ...
Page 99: ...54 Connecting MECHATROLINK Devices Section 3 5 ...
Page 283: ...238 Saving Data Section 5 4 ...
Page 417: ...372 Command Details Section 6 3 ...





















































