





























304
Command Details
Section 6-3
• When [Number of turns] is specified, multiple rotations will occur. In addi-
tion, multiple rotations can be specified only for center position specifica-
tion. For radius specification, programs cannot be loaded (because the
center position cannot be determined If the start position = the end posi-
tion for radius specification.)
• The number of rotations excluding the circular arc from the start point to
the end point is specified for [Number of turns]. When the start position is
not equal to the end position, the travel distance per block will be circular
arc of [Number of turns] + a. When the start position is equal to the end
position, the travel distance per block will be circular arc of [Number of
turns] + 1.
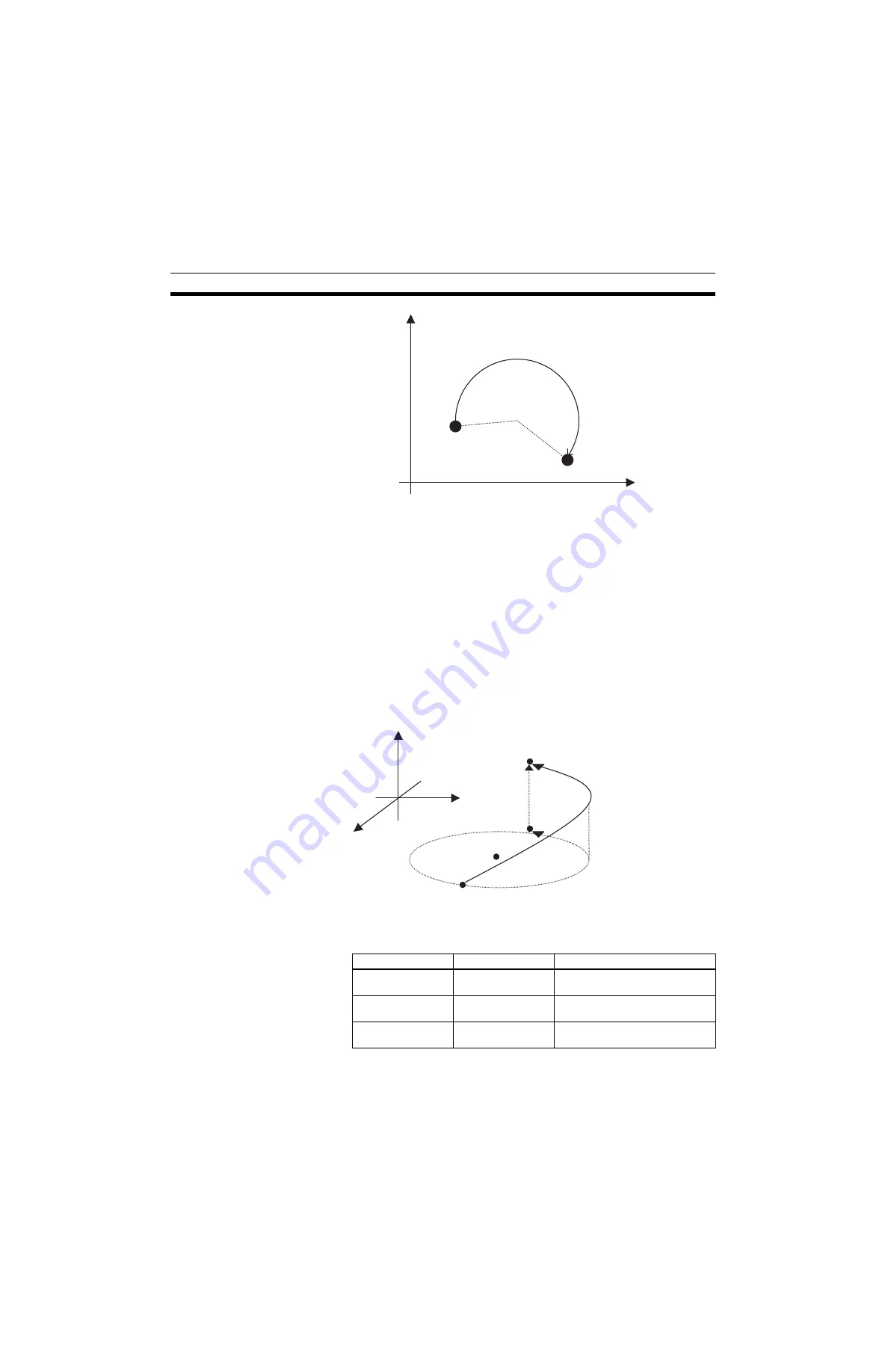
• If [Linear axis name] and [Linear axis command value] are added, helical
circular interpolation can be realized. If [Number of turns] is specified to
realize multiple rotations for helical circular interpolation, the end position
has to be specified.
• [Interpolation feed rate] is handled as shown in the table below depending
on the interpolation type and the setting of the parameter [P00004.bit00:
Helical circular interpolation speed].
Interpolation type
P00004.00
Interpolation feed rate
Circular interpolation 0 or 1
Combined speed of the horizontal
and vertical axes
Helical circular inter-
polation
0 (speed on the cir-
cumference)
Combined speed of the horizontal
and vertical axes
Helical circular inter-
polation
1 (speed on the tan-
gent)
Combined speed of the horizon-
tal, vertical, and linear axes.
0
Vertical axis
Start
position
Center
Radius
End position
Horizontal axis
Axis 3
End position
Horizontal
axis
Vertical
axis
Linear interpolation
portion
Center
Start position
Circular interpolation
Summary of Contents for CS1W-MCH71 -
Page 2: ...CS1W MCH71 CJ1W MCH71 Motion Control Unit Operation Manual Revised June 2008 ...
Page 3: ...iv ...
Page 29: ...xxx ...
Page 33: ...xxxiv ...
Page 35: ...xxxvi ...
Page 39: ...xl ...
Page 69: ...24 Performance Section 1 7 ...
Page 99: ...54 Connecting MECHATROLINK Devices Section 3 5 ...
Page 283: ...238 Saving Data Section 5 4 ...
Page 417: ...372 Command Details Section 6 3 ...





















































