





























Chapter 12
•
•
•
■
•
•
Chapter 12
Multistage Position Switching Function
• By combining 076 to 079 ([CP1] terminal to [CP4]
terminal), the multistage position commands 0 to
15 can be switched.
• For setting the position command, use the
multistage
[AE-50]).
• When there no terminal assignments, the
multistage position command 0 ([AE
the position command.
Position
command
Multistage
position 0
Multistage
position 1
Multistage
position 2
Multistage
position 3
Multistage
position 4
Multistage
position 5
Multistage
position 6
Multistage
position 7
Multistage
position 8
Multistage
position 9
Multistage
position 10
Multistage
position 11
Multistage
position 12
Multistage
position 13
Multistage
position 14
Multistage
position 15
■
Speed/Position Switching Function
• Turn on this terminal when the speed control
operation is performed in the absolute position
control mode.
• While the 084[SPD] terminal is on, the current
position counter is 0.
terminal is turned off during the operation, the
position control operation starts at that time.
(Speed/position switching)
Chapter 12
Multistage Position Switching Function
By combining 076 to 079 ([CP1] terminal to [CP4]
terminal), the multistage position commands 0 to
15 can be switched.
For setting the position command, use the
position command 0 to 15 ([AE
When there no terminal assignments, the
multistage position command 0 ([AE
the position command.
CP4
OFF
OFF
OFF
OFF
OFF
OFF
OFF
OFF
ON
ON
ON
ON
ON
ON
ON
ON
Speed/Position Switching Function
Turn on this terminal when the speed control
operation is performed in the absolute position
control mode.
While the 084[SPD] terminal is on, the current
position counter is 0. Therefore, when the [SPD]
terminal is turned off during the operation, the
position control operation starts at that time.
(Speed/position switching)
Output
frequency
[SPD]
Terminal
Multistage Position Switching Function
By combining 076 to 079 ([CP1] terminal to [CP4]
terminal), the multistage position commands 0 to
For setting the position command, use the
position command 0 to 15 ([AE
When there no terminal assignments, the
multistage position command 0 ([AE
the position command.
CP3
CP2
OFF
OFF
OFF
OFF
OFF
ON
OFF
ON
ON
OFF
ON
OFF
ON
ON
ON
ON
OFF
OFF
OFF
OFF
OFF
ON
OFF
ON
ON
OFF
ON
OFF
ON
ON
ON
ON
Speed/Position Switching Function
Turn on this terminal when the speed control
operation is performed in the absolute position
While the 084[SPD] terminal is on, the current
Therefore, when the [SPD]
terminal is turned off during the operation, the
position control operation starts at that time.
(Speed/position switching)
Speed
control
ON
12
Multistage Position Switching Function
By combining 076 to 079 ([CP1] terminal to [CP4]
terminal), the multistage position commands 0 to
For setting the position command, use the
position command 0 to 15 ([AE-20] to
When there no terminal assignments, the
multistage position command 0 ([AE-20]) becomes
CP2
CP1
OFF
OFF
OFF
ON
OFF
ON
OFF
OFF
OFF
ON
OFF
ON
OFF
OFF
OFF
ON
OFF
ON
OFF
OFF
OFF
ON
OFF
ON
Turn on this terminal when the speed control
operation is performed in the absolute position
While the 084[SPD] terminal is on, the current
Therefore, when the [SPD]
terminal is turned off during the operation, the
position control operation starts at that time.
Speed
control
ON
12-17-27
By combining 076 to 079 ([CP1] terminal to [CP4]
terminal), the multistage position commands 0 to
20] to
20]) becomes
operation is performed in the absolute position
Therefore, when the [SPD]
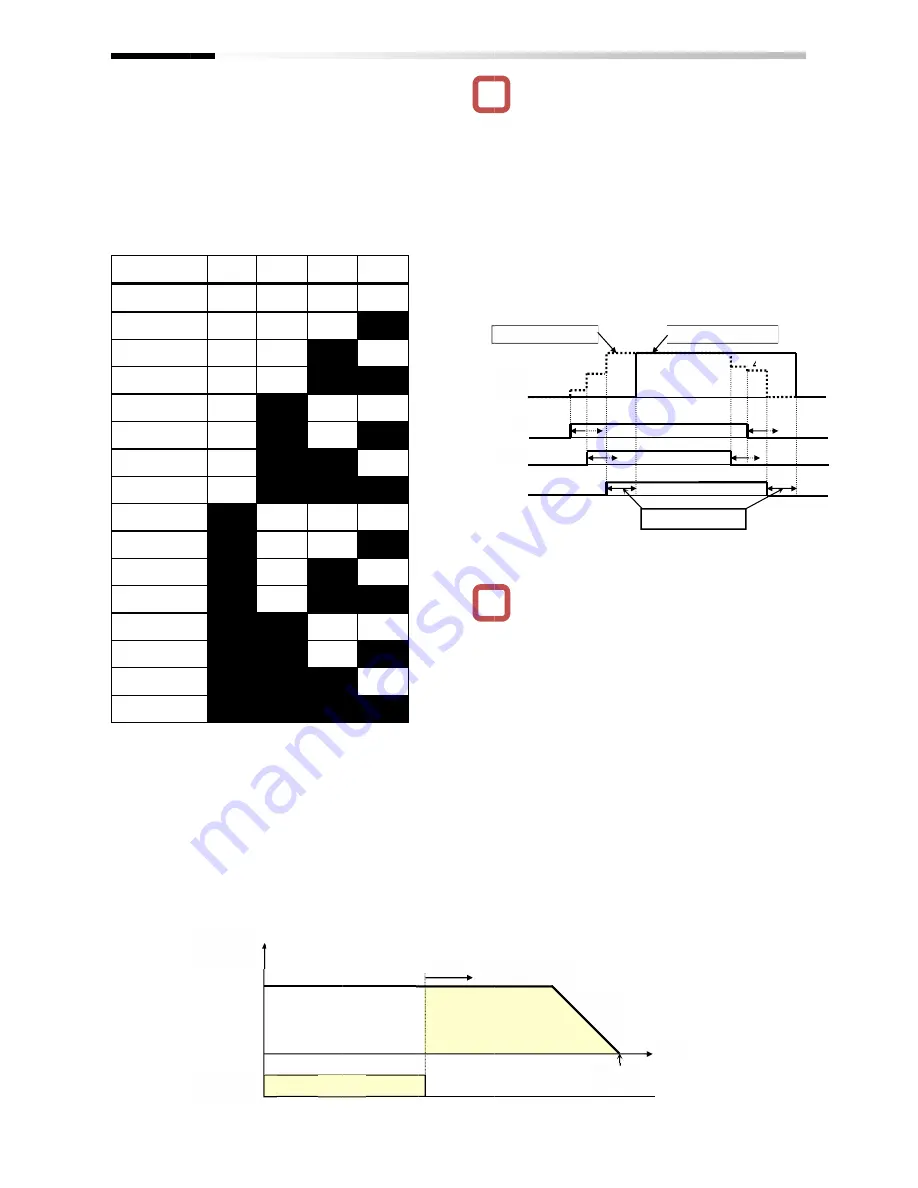
• When inputting the multistage position command,
the waiting time until the terminal input
be set. The transition state before the input is fixed
can be prevented from being adopted as the input.
• With the [CA
fixing time can be adjusted. Finally, after the
[CA
the input, the data is fixed. (Note that a longer fixing
time causes a bad performance of the input
response.)
• Example using [CP1] to [CP3] as the input
terminals
• When switching the speed to position, if the
deviation between the position command and
current position is 0, the stop operation is
performed immediately.
(Depending on the
• Also, while the [SPD] terminal is on, there is a
move in the direction depending on the operation
command. For switching the speed to position, note
the sign of the command.
!
!
Position
command
Position control
Position count start
27
When inputting the multistage position command,
the waiting time until the terminal input
be set. The transition state before the input is fixed
can be prevented from being adopted as the input.
With the [CA-
fixing time can be adjusted. Finally, after the
[CA-55] setting time passes without a
the input, the data is fixed. (Note that a longer fixing
time causes a bad performance of the input
response.)
Example using [CP1] to [CP3] as the input
terminals
When switching the speed to position, if the
deviation between the position command and
current position is 0, the stop operation is
performed immediately.
(Depending on the
possibility of hunting)
Also, while the [SPD] terminal is on, there is a
move in the direction depending on the operation
command. For switching the speed to position, note
the sign of the command.
CP1
CP2
CP3
Position
command
[CA-55] Zero fixing time
Position control
Position count start
When inputting the multistage position command,
the waiting time until the terminal input
be set. The transition state before the input is fixed
can be prevented from being adopted as the input.
-55] multistage input fixing time, the
fixing time can be adjusted. Finally, after the
55] setting time passes without a
the input, the data is fixed. (Note that a longer fixing
time causes a bad performance of the input
Example using [CP1] to [CP3] as the input
When switching the speed to position, if the
deviation between the position command and
current position is 0, the stop operation is
performed immediately.
(Depending on the position loop gain, there is a
possibility of hunting)
Also, while the [SPD] terminal is on, there is a
move in the direction depending on the operation
command. For switching the speed to position, note
the sign of the command.
[
1
3
55] Zero fixing time
7
Target
position
Inverter Functions
When inputting the multistage position command,
the waiting time until the terminal input
be set. The transition state before the input is fixed
can be prevented from being adopted as the input.
55] multistage input fixing time, the
fixing time can be adjusted. Finally, after the
55] setting time passes without any changes of
the input, the data is fixed. (Note that a longer fixing
time causes a bad performance of the input
Example using [CP1] to [CP3] as the input
When switching the speed to position, if the
deviation between the position command and
current position is 0, the stop operation is
position loop gain, there is a
Also, while the [SPD] terminal is on, there is a
move in the direction depending on the operation
command. For switching the speed to position, note
the sign of the command.
[CA-55] Fixing time
[CA-55] Fixing
Time
Inverter Functions
When inputting the multistage position command,
the waiting time until the terminal input is fixed can
be set. The transition state before the input is fixed
can be prevented from being adopted as the input.
55] multistage input fixing time, the
fixing time can be adjusted. Finally, after the
ny changes of
the input, the data is fixed. (Note that a longer fixing
time causes a bad performance of the input
Example using [CP1] to [CP3] as the input
When switching the speed to position, if the
deviation between the position command and
current position is 0, the stop operation is
position loop gain, there is a
Also, while the [SPD] terminal is on, there is a
move in the direction depending on the operation
command. For switching the speed to position, note
55] Fixing time
55] Fixing time
4
5
Inverter Functions
When inputting the multistage position command,
is fixed can
be set. The transition state before the input is fixed
can be prevented from being adopted as the input.
ny changes of
the input, the data is fixed. (Note that a longer fixing
command. For switching the speed to position, note
Summary of Contents for SJ Series
Page 39: ...5 4 Chapter 5 Included Items Memo ...
Page 55: ...6 16 Chapter 6 Installation Memo ...
Page 91: ...7 36 Chapter 7 Wire Connection and Optional Devices Memo ...
Page 135: ...9 40 Chapter 9 Operating Instructions Memo ...
Page 145: ...10 10 Chapter 10 Test Run Memo ...
Page 159: ...12 2 6 Chapter 12 Inverter Functions Memo ...
Page 169: ...12 3 10 Chapter 12 Inverter Functions Memo ...
Page 195: ...12 5 8 Chapter 12 Inverter Functions Memo ...
Page 217: ...12 8 12 Chapter 12 Inverter Function Memo ...
Page 287: ...12 10 32 Chapter 12 Inverter Functions Memo ...
Page 303: ...12 11 16 Chapter 12 Inverter Functions Memo ...
Page 349: ...12 15 8 Chapter 12 Inverter Function Memo ...
Page 395: ...12 17 34 Chapter 12 Inverter Functions Memo ...
Page 397: ...12 18 2 Chapter 12 Inverter Functions Memo ...
Page 415: ...12 19 18 Chapter 12 Inverter Function Memo ...
Page 581: ...15 10 Chapter 15 Optional Cassettes Memo ...
Page 591: ...16 10 Chapter 16 ProDriveNext EzSQ Memo ...
Page 642: ...18 49 Chapter 18 Tips FAQ Troubleshooting Memo ...
Page 650: ...19 8 Chapter 19 Maintenance and Inspection Memo ...
Page 781: ...Appendix 1 70 Appendix 1 List of Parameters Memo ...







































































