





























Chapter 12
Adjusting the stop position at the positioning
operation
■
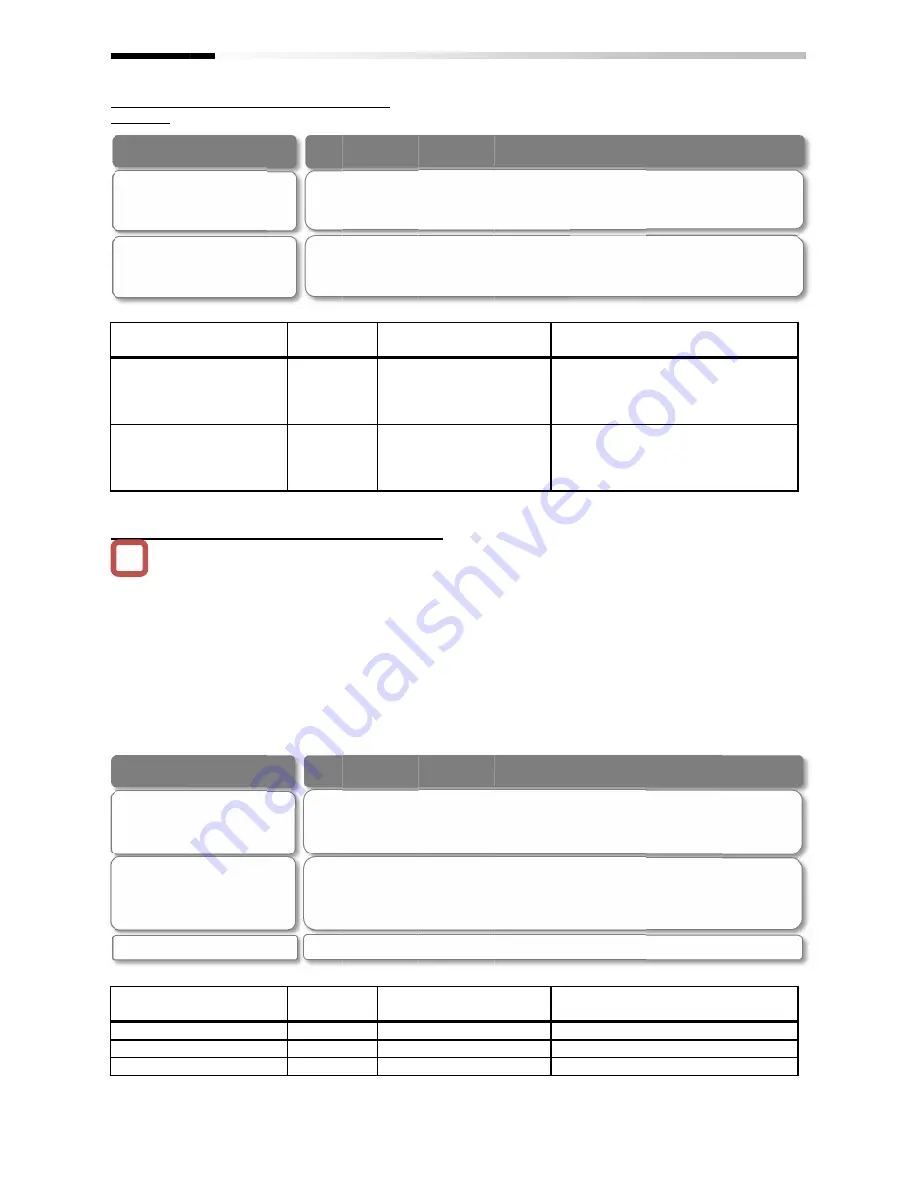
Adjusting the control gain at the positioning operation
•
•
•
■
Stop position is
Position
Stop position is short
Position shortens
The follow
stop is bad.
An abrupt behavior
the positioning stop.
An axis vibrates during the stop
Chapter 12
Adjustment of Positioning Control
Adjusting the stop position at the positioning
operation
■
Parameters
Adjusting the control gain at the positioning operation
• Set [AE-66] and [AE
[Hb105] maximum frequency
• Once the positioning operation is
control starts at the speed set to the [AE
start speed.
• During the positioning operation, the speed is
limited to that set to the [AE
limit. During the positioning, the
acceleration/deceleration time is 0 and th
follows the internal position control results.
■
Parameters
Item
For calculating the
deceleration stop
distance
Gain
For calculating the
deceleration stop
distance
Bias
Item
Position loop gain
APR control speed limit
APR start speed
!
Occurrence
Stop position is
Position overruns
Stop position is short
Position shortens
Occurrence
The follow-up for the positioning
stop is bad.
An abrupt behavior
the positioning stop.
An axis vibrates during the stop
Chapter 12
Adjustment of Positioning Control
Adjusting the stop position at the positioning
Parameters
Adjusting the control gain at the positioning operation
66] and [AE-67] to the ratios against the
[Hb105] maximum frequency
Once the positioning operation is
control starts at the speed set to the [AE
start speed.
During the positioning operation, the speed is
limited to that set to the [AE
limit. During the positioning, the
acceleration/deceleration time is 0 and th
follows the internal position control results.
Parameters
Item
For calculating the
deceleration stop
For calculating the
deceleration stop
Item
Position loop gain
APR control speed limit
APR start speed
Occurrence
Stop position is long
overruns
Stop position is short
Position shortens
Occurrence
up for the positioning
An abrupt behavior occurs at
the positioning stop.
An axis vibrates during the stop
Adjustment of Positioning Control
Adjusting the stop position at the positioning
Adjusting the control gain at the positioning operation
67] to the ratios against the
[Hb105] maximum frequency.
Once the positioning operation is entered, the
control starts at the speed set to the [AE
During the positioning operation, the speed is
limited to that set to the [AE-66] APR control speed
limit. During the positioning, the
acceleration/deceleration time is 0 and th
follows the internal position control results.
Function
Code
[AE-64]
[AE-65]
Function
Code
[AE-07]
[AE-66]
[AE-67]
• Adjust by increasing [AE
or
• Adjust by increasing [AE
• Adjust by decreasing [AE
or
• Adjust by decreasing
up for the positioning
•
Adjust by increasing [AE
or
• Adjust by increasing [AE
occurs at
• Adjust by decreasing [AE
or
• Adjust by decreasing [AE
An axis vibrates during the stop • Adjust by decreasing [AE
12
Adjusting the stop position at the positioning
Adjusting the control gain at the positioning operation
67] to the ratios against the
entered, the
control starts at the speed set to the [AE-67] APR
During the positioning operation, the speed is
APR control speed
acceleration/deceleration time is 0 and the output
follows the internal position control results.
Function
Code
Data/Data Range
64]
50.00
65]
0.00
Function
Code
Data/Data
07]
66]
0.00
67]
0.00
Adjust by increasing [AE
Adjust by increasing [AE
Adjust by decreasing [AE
Adjust by decreasing
Adjust by increasing [AE
Adjust by increasing [AE
Adjust by decreasing [AE
Adjust by decreasing [AE
Adjust by decreasing [AE
12-17-24
Adjusting the control gain at the positioning operation
67] to the ratios against the
APR
APR control speed
e output
• For the positioning operation, specify the stop
behavior with the following functions
-
-
-
-
-
Data/Data Range
50.00~200.00(%)
0.00~655.35(%)
Data/Data Range
0.00~100.00
0.00~100.00(%)
0.00~100.00(%)
Adjust by increasing [AE-64] by 5%.
Adjust by increasing [AE-65] by 5%.
Adjust by decreasing [AE-64] by 5
Adjust by decreasing [AE-65] by 5
Adjust by increasing [AE-07] by 5%.
Adjust by increasing [AE-67] and [AE
Adjust by decreasing [AE-07] by 5
Adjust by decreasing [AE-67] and [AE
Adjust by decreasing [AE-07] by 5
24
For the positioning operation, specify the stop
behavior with the following functions
Absolute value control
Zero return
Orientation
SON terminal operation (at position servo)
DC braking (at position servo lock control)
Data/Data Range
200.00(%)
Adjust against the stop distance.
655.35(%)
Adjust the output frequency for the
positioning operation.
Range
100.00
Adjust the position loop gain.
100.00(%)
Limit the output at the positioning.
100.00(%)
Set the speed at the positioning start.
Workaround Examples
64] by 5%.
65] by 5%.
64] by 5%.
65] by 5%.
Workaround Examples
07] by 5%.
67] and [AE-66] by 1%.
07] by 5%.
67] and [AE-66] by 1%.
07] by 5%.
For the positioning operation, specify the stop
behavior with the following functions
Absolute value control
SON terminal operation (at position servo)
DC braking (at position servo lock control)
Description
Adjust against the stop distance.
Adjust the output frequency for the
positioning operation.
Description
Adjust the position loop gain.
Limit the output at the positioning.
Set the speed at the positioning start.
Workaround Examples
Workaround Examples
66] by 1%.
66] by 1%.
Inverter Functions
For the positioning operation, specify the stop
behavior with the following functions
SON terminal operation (at position servo)
DC braking (at position servo lock control)
Description
Adjust against the stop distance.
Adjust the output frequency for the
positioning operation.
Description
Adjust the position loop gain.
Limit the output at the positioning.
Set the speed at the positioning start.
Inverter Functions
For the positioning operation, specify the stop
SON terminal operation (at position servo)
DC braking (at position servo lock control)
Adjust against the stop distance.
Adjust the output frequency for the
Adjust the position loop gain.
Limit the output at the positioning.
Set the speed at the positioning start.
Inverter Functions
Summary of Contents for SJ Series
Page 39: ...5 4 Chapter 5 Included Items Memo ...
Page 55: ...6 16 Chapter 6 Installation Memo ...
Page 91: ...7 36 Chapter 7 Wire Connection and Optional Devices Memo ...
Page 135: ...9 40 Chapter 9 Operating Instructions Memo ...
Page 145: ...10 10 Chapter 10 Test Run Memo ...
Page 159: ...12 2 6 Chapter 12 Inverter Functions Memo ...
Page 169: ...12 3 10 Chapter 12 Inverter Functions Memo ...
Page 195: ...12 5 8 Chapter 12 Inverter Functions Memo ...
Page 217: ...12 8 12 Chapter 12 Inverter Function Memo ...
Page 287: ...12 10 32 Chapter 12 Inverter Functions Memo ...
Page 303: ...12 11 16 Chapter 12 Inverter Functions Memo ...
Page 349: ...12 15 8 Chapter 12 Inverter Function Memo ...
Page 395: ...12 17 34 Chapter 12 Inverter Functions Memo ...
Page 397: ...12 18 2 Chapter 12 Inverter Functions Memo ...
Page 415: ...12 19 18 Chapter 12 Inverter Function Memo ...
Page 581: ...15 10 Chapter 15 Optional Cassettes Memo ...
Page 591: ...16 10 Chapter 16 ProDriveNext EzSQ Memo ...
Page 642: ...18 49 Chapter 18 Tips FAQ Troubleshooting Memo ...
Page 650: ...19 8 Chapter 19 Maintenance and Inspection Memo ...
Page 781: ...Appendix 1 70 Appendix 1 List of Parameters Memo ...







































































