





























5 - 166
MELSEC-A
5 DATA USED FOR POSITIONING CONTROL
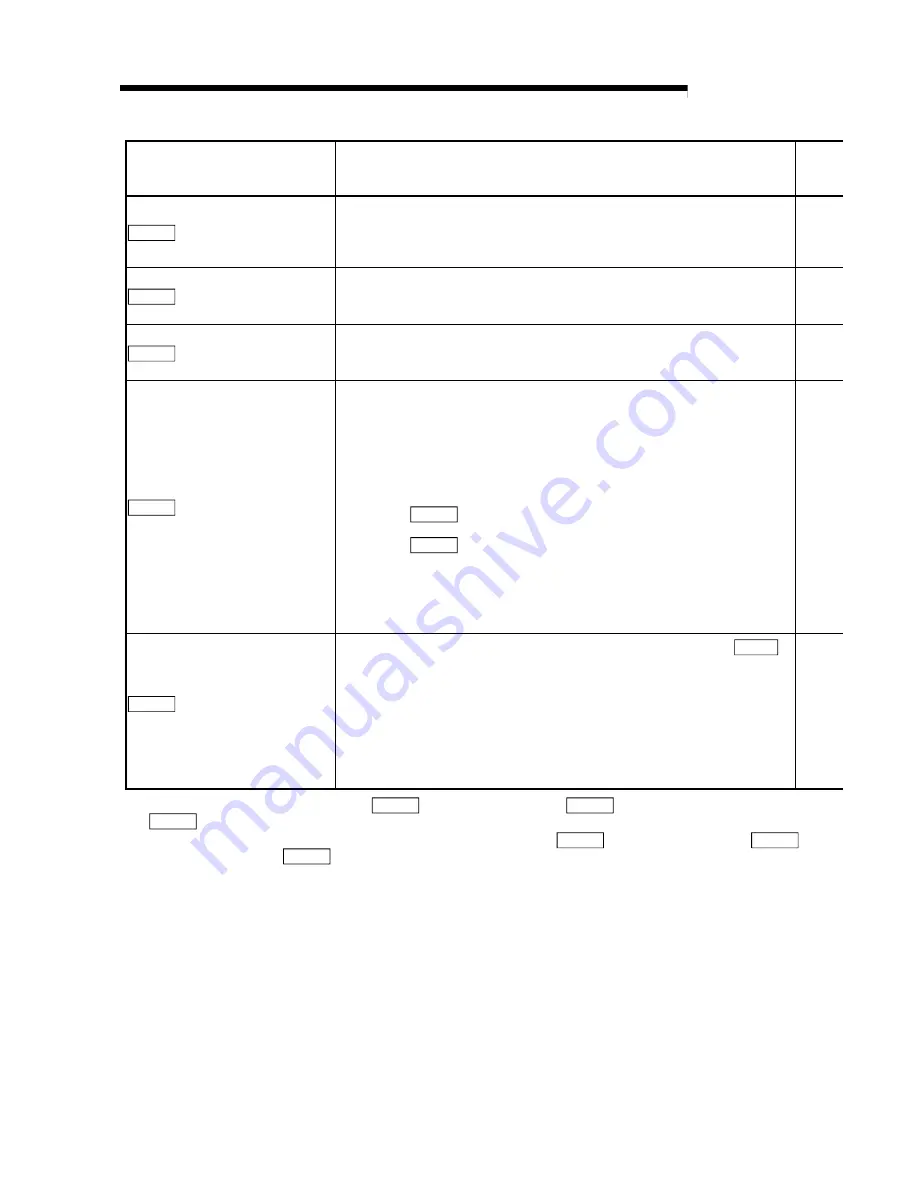
Storage item
Storage details
Md.117
Regenerative load ratio
*1
•
The average value of the ratios of the regenerative load to the allowable value of
the regenerative brake resistor selected in the servo basic parameter for the past
15 seconds is stored. (Unit: 1%)
•
The update timing is 1 second interval.
Md.118
Effective load ratio
*1
•
The average value of the ratios of the load to the rated torque of the servomotor
for the past 15 seconds is stored. (Unit: 1%)
•
The update timing is 1 second interval.
Md.119
Peak load ratio
*1
•
The held value of the ratio of the peak load to the rated torque of the servomotor
is stored. (Unit: 1%)
•
The update timing is 1 second interval.
Md.120
FeRAM access count
•
The FeRAM access count is stored.
•
The value is incremented by "3" at power-on.
•
Increase of the value at a machine zero point return in the absolute position
detection system
(a) When "
Md.121
Absolute position restoration mode" is switched between the
"standard mode" and "infinite length mode", the value is incremented by "4".
(b) When "
Md.121
Absolute position restoration mode" is not switched, the
value is incremented by "2".
•
The update timing is 56.8ms.
Md.121
Absolute position
restoration mode
•
The mode for absolute position restoration is stored in the axis where "
Pr.1
Unit setting" is "2: degree" and absolute position detection is valid.
(Set timing)
At power-on
At completion of machine zero point return
•
The update timing is 56.8ms.
Refer to section 12.6.2 for details of mode switching for absolute position
restoration.
*1: During any of the following processings, "
Md.117
Regenerative load ratio", "
Md.118
Effective load ratio" and
"
Md.119
Peak load ratio" storage buffer memory data are not updated.
During the processing, therefore, a delay may occur in the updating of the "
Md.117
Regenerative load ratio", "
Md.118
Effective load ratio" and "
Md.119
Peak load ratio" storage buffer memory data.
•
When a machine zero point return is made (when ZCT is read, when the absolute position reference point is read)
•
When initial communication is being made with the servo amplifier
•
When the PLC READY signal [Y1D] is turned from OFF to ON
•
When the servo parameters are updated with the "AD75M servo position control gain function" of GX Configurator-AP
(For details of GX Configurator-AP, refer to the GX Configurator-AP Operating Manual.)
Summary of Contents for A1SD75M1
Page 2: ......
Page 20: ...A 18 MEMO...
Page 22: ...MEMO...
Page 27: ...1 5 MELSEC A 1 PRODUCT OUTLINE MEMO...
Page 42: ...1 20 MELSEC A 1 PRODUCT OUTLINE MEMO...
Page 52: ...2 10 MELSEC A 2 SYSTEM CONFIGURATION MEMO...
Page 111: ...5 21 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Page 115: ...5 25 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Page 123: ...5 33 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Page 127: ...5 37 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Page 167: ...5 77 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Page 193: ...5 103 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Page 276: ...5 186 MELSEC A 5 DATA USED FOR POSITIONING CONTROL MEMO...
Page 332: ...7 18 MELSEC A 7 MEMORY CONFIGURATION AND DATA PROCESS MEMO...
Page 334: ...MEMO...
Page 422: ...9 64 MELSEC A 9 MAIN POSITIONING CONTROL MEMO...
Page 446: ...10 24 MELSEC A 10 ADVANCED POSITIONING CONTROL MEMO...
Page 472: ...11 26 MELSEC A 11 MANUAL CONTROL MEMO...
Page 576: ...12 104 MELSEC A 12 CONTROL AUXILIARY FUNCTIONS MEMO...
Page 745: ......







































































