




























21-561
21-561
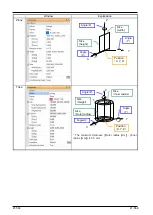
Figure 21-84 User mech. relationship to robot
21.9.3. User mech. lnterference check
When [True] is selected, By clicking the [3D view] -> [interference check] button, interference check between the
user mech. and other objects etc. can be done.
Figure 21-85 User mech. lnterference check
Please refer to “
21.10. Spline Display Settings
Display the 3D monitor and select the spline whose display settings are to be changed in the layout tree.
The display settings of that spline will be displayed at "Properties", and spline related display settings can be
changed at respective items.
For details on how to add a spline, refer to
"Adding a spline"
.
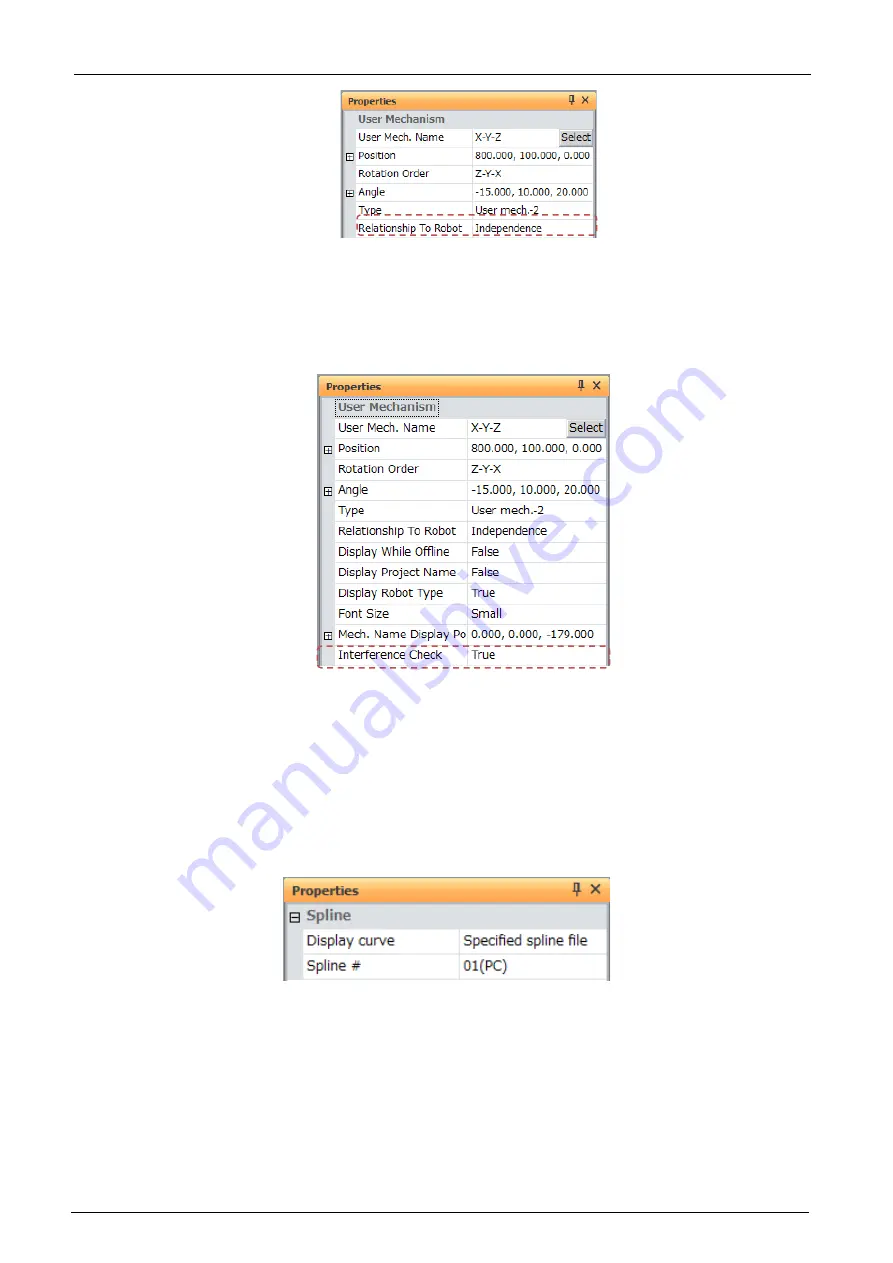
Figure 21-86 Spline Display Settings
At [Display curve], you can select [Opened spline file], [Specified spline file] and [MXT file].
21.10.1.
Opened spline file
If the Spline screen for the target robot is opened, the data displayed in that screen can be displayed as the
spline curve.
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...







































































