





























21-547
21-547
21.6.8. Movement area
You can check the movement area in the robot's current posture in the 3D monitor.
In the offline mode, [Movement area] is not displayed.
When the posture is changed, click the [3D view] tab -> [3D View] group -> [Update Movement Area] button on
the ribbon to refresh the movement area display. Updating takes several seconds depending on the performance
of the PC.
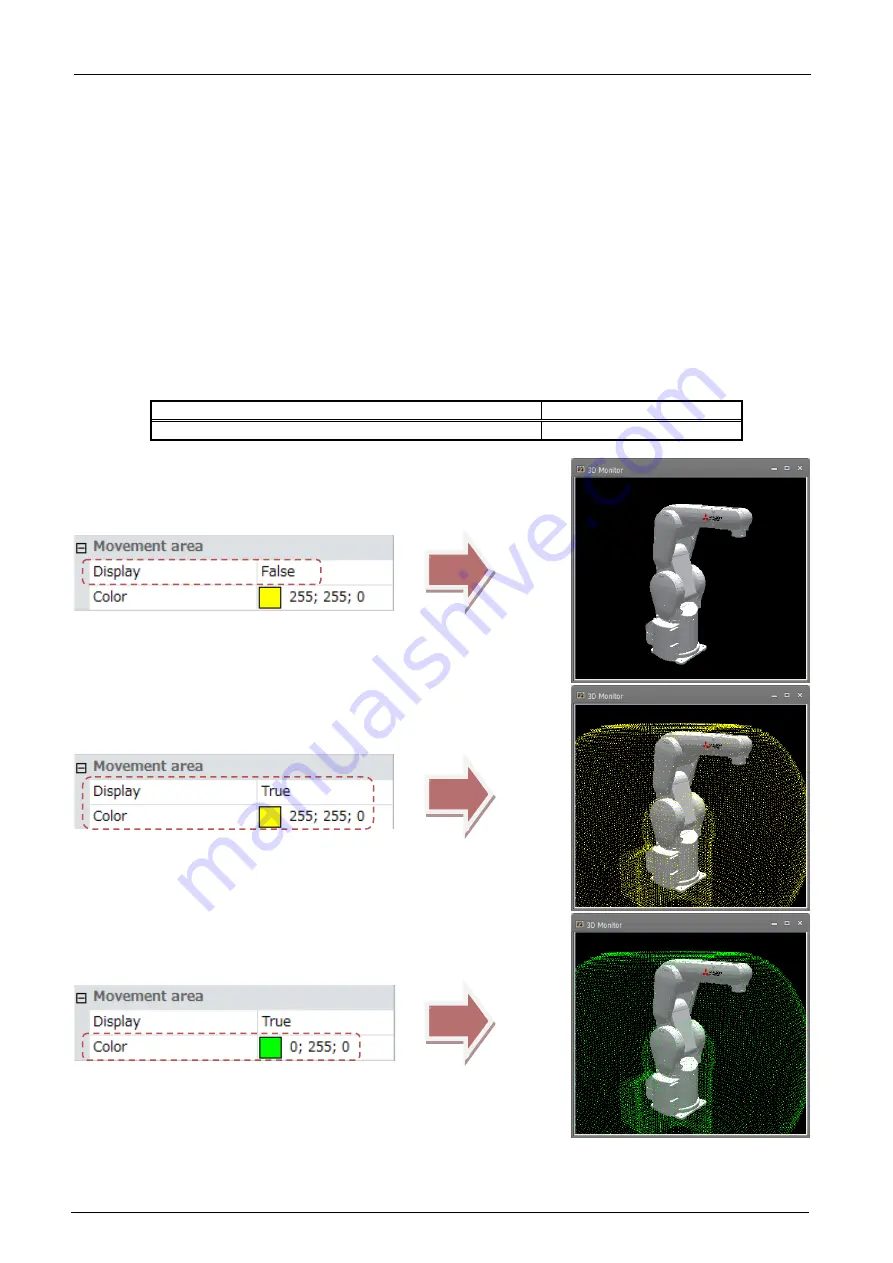
When [Display] is set to [True], positions that the robot can move in the posture at the tool control point at that
time are displayed on the 3D monitor as the movement area.
When [Color] is changed, the color of the movement area displayed on the 3D monitor is changed to the new
color. Click the [...] button at [Color]. The Set Color screen is displayed. The color can be set visually in this
screen.
The display of the movement area is restricted according to the robot model that is displayed.
The following table shows the models that do not support display of movement area.
Robot model type
Models that do not support display of movement area.
RH-G, RC-G, RH-U
Figure 21-57 Displaying and Hiding the Movement Area and Changing the Color
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...