





























11-144
11-144
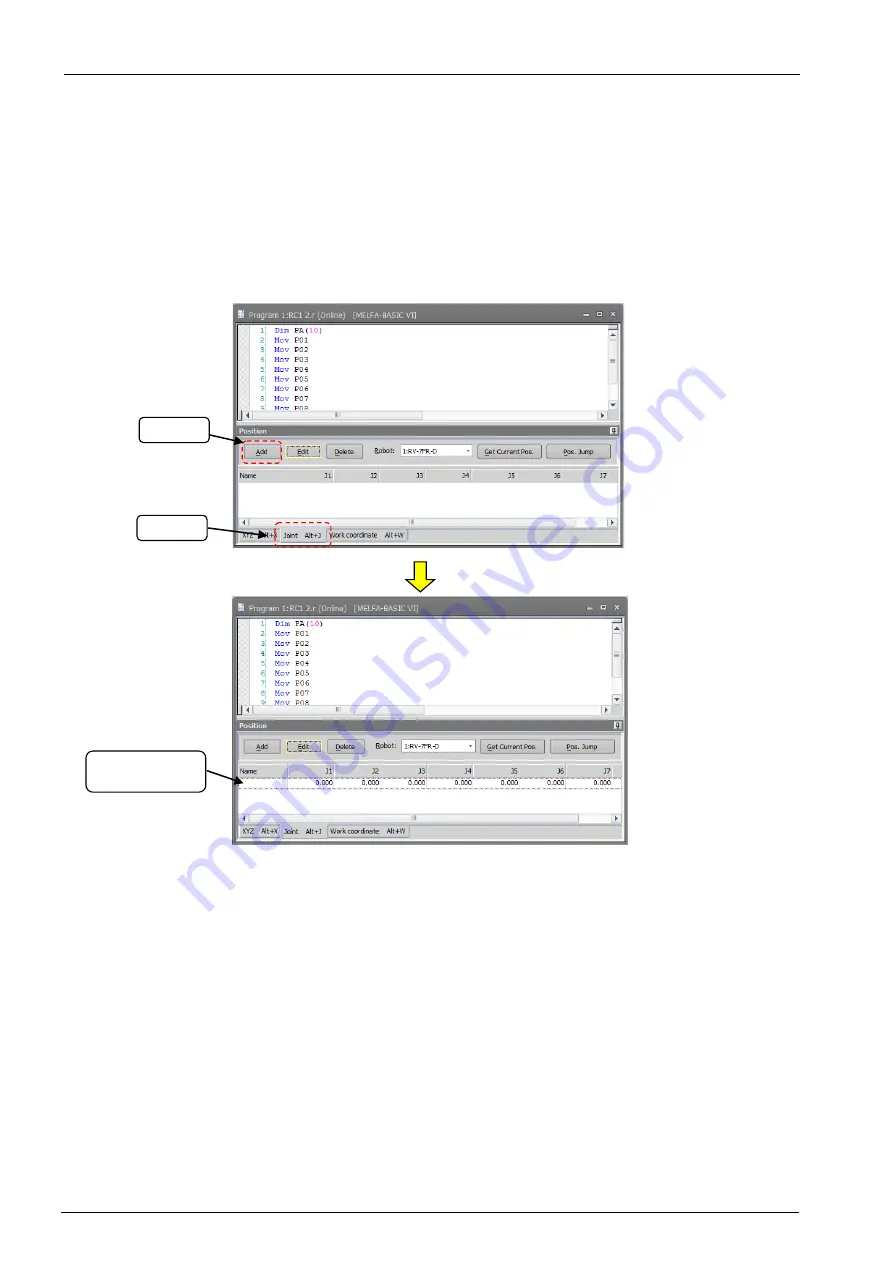
11.7.3.1. Adding/changing position variables
To add a position variable, select one of the list of XYZ/joint/work coordinate type variables, and click the [Add]
button on the program edit screen or click the [Add] button in the [Edit] tab -> [Position Variable] group from the
ribbon. A new line is added to the end of the currently selected list and the screen is ready for input of the variable
name.(*1)
At this time, if "Get Current Position Automatically" in the option screen is checked and there is a connection to the
robot, the current position of the robot is displayed.
If you add a position variable that has already been selected, the selected position variable is copied and displayed.
When the variable name is entered, addition of the position variable is fixed.
Figure 11-35 Add Position Variable
Enter variable
name
Click
Select
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...