




























11-193
11-193
11.14.3.
Position data conversion (from E/EN/M1/M2 series to CR800/750/700/500
series)
This function converts the format of position data and the relevant commands (DJ, MP and PD MOVEMASTER
commands), because the configuration of the E/EN/M1/M2 series controller’s position data is different from the
CR800/750/700/500 series controller’s.
Note1:
The program conversion converts the position data as well as the commands related to the position
data. It is not possible to convert commands automatically. Be sure to make a syntax check using this
software before using the E/EN/M1/M2 series program with the CR800/750/700/500 series, and
change the commands if necessary.
Note2:
The position data of the MOVEMASTER command programs for the M1/M2 series has the
base-coordinate rotated 90º. When using the program for M1/M2 with the CR800/750/700/500 series,
convert M1/M2 program into an EN program with the E/EN/M1/M2 series support software DOS version,
before carrying out the program conversion.
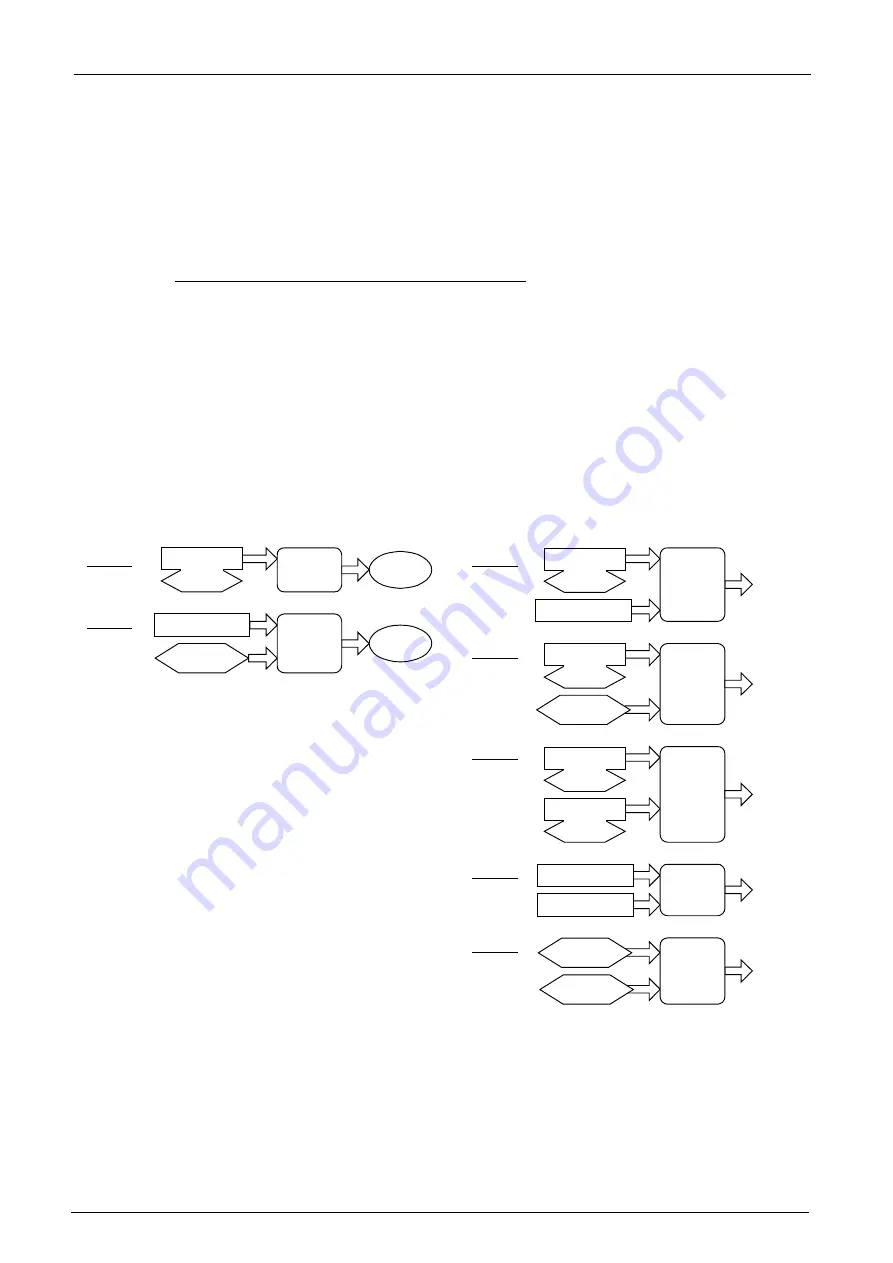
Note3:
In the case of the E/EN/M1/M2 series support software DOS version and E/EN series Robot
programming PC support software for Windows, the data can be saved separately such as command
sentence only, position data only, or command sentence and position data. In this program conversion,
it is possible to convert the file of command sentence only and the file of position data only to one
program. The other combinations occurs error. (As following case 3 to 7.)
Position data only
Command sentence only
Program
OK
NG
Case 1:
Case 2:
Case 3:
Case 4:
Program
conversion
Position data
Command
sentence
+
Program
OK
Program
conversion
Program
conversion
Program
conversion
NG
Case 5:
Program
conversion
NG
Case 6:
Program
conversion
NG
Case 7:
Program
conversion
NG
Position data
Command
sentence
+
Case 3:
Position data
Command
sentence
+
Case 4:
Case 3:
Position data
Command
sentence
+
Case 5:
Case 4:
Case 3:
Position data
Command
sentence
+
Command sentence only
Command sentence only
Command sentence only
Position data only
Position data only
Position data only
Case 3:
Case 4:
Case 5:
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...




































































