




























21-555
21-555
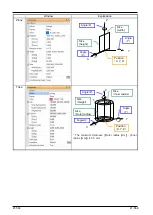
21.7.3. Write TCP (hand tip)
If you select the hand setting and the tool number other than [-], the [TCP Write] button will be enabled.
Click the [TCP Write] button to write the TCP coordinate value set by the hand to
the tool parameter. (MEXTL/MEXTLn, n = tool #1-)
Figure 21-68 TCP Write
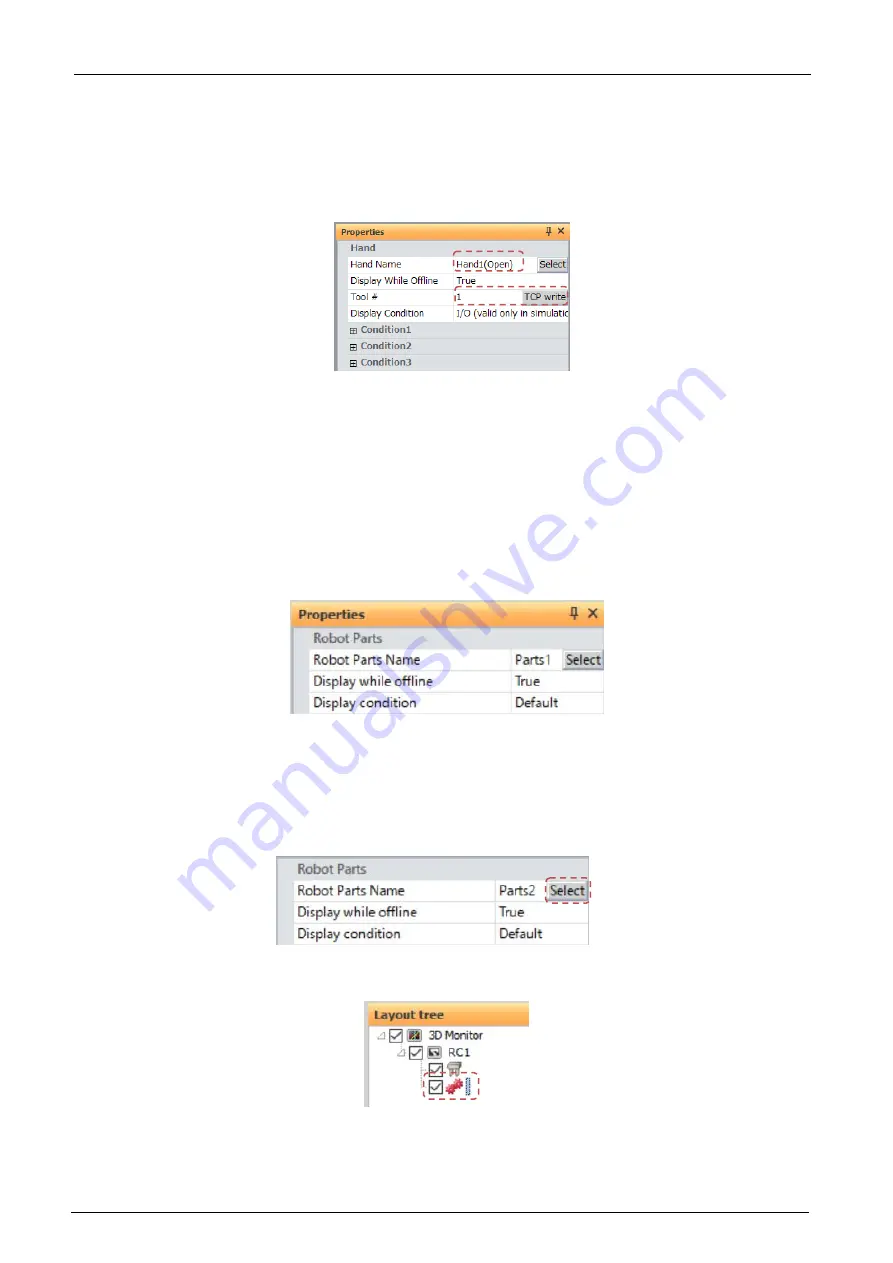
21.8. Robot Parts Display Settings
Display the 3D monitor and select the robot parts whose display settings are to be changed in the layout tree.
The display settings of that robot parts will be displayed at "Properties", and robot parts related display settings
can be changed at respective items.
For details on how to add robot parts in the layout tree, see
.
Also, to display robot parts in the 3D monitor, robot parts must be registered separately to the workspace. For
details on how to register robot parts, see
.
Figure 21-69 Robot Parts Display Settings
21.8.1. Robot parts display content
At [Robot Parts Name], the robot parts file name is displayed as the name of the item.
Also, the Select robot parts file screen is displayed by selecting [Robot Parts Name] and clicking the [Select]
button or
double-clicking a
robot part
whose file is not set on the layout tree
..
Figure 21-70 Robot Parts Name Select Button
Figure 21-71 Undefined Robot Parts
In the Select robot parts file screen, the list of robot parts files currently registered to the workspace are displayed.
Select the robot parts file to display in the list, check content in the 3D monitor and select the [OK] button. The
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...