




























21-556
21-556
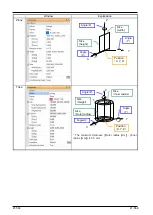
selected robot parts file is set to the display content.
Figure 21-72 Select Robot Parts File Screen
21.8.2. Display conditions
By setting display conditions, the target robot parts file can be displayed only in specified I/O states or when a
tool is selected.
- Display in offline mode
In the offline mode, robot parts for which [True] is selected are displayed.
This setting is possible only on one robot part per robot. When [Display while offline] is changed to [True], all
other robot parts are changed to [False].
Figure 21-73 Display in Offline Mode
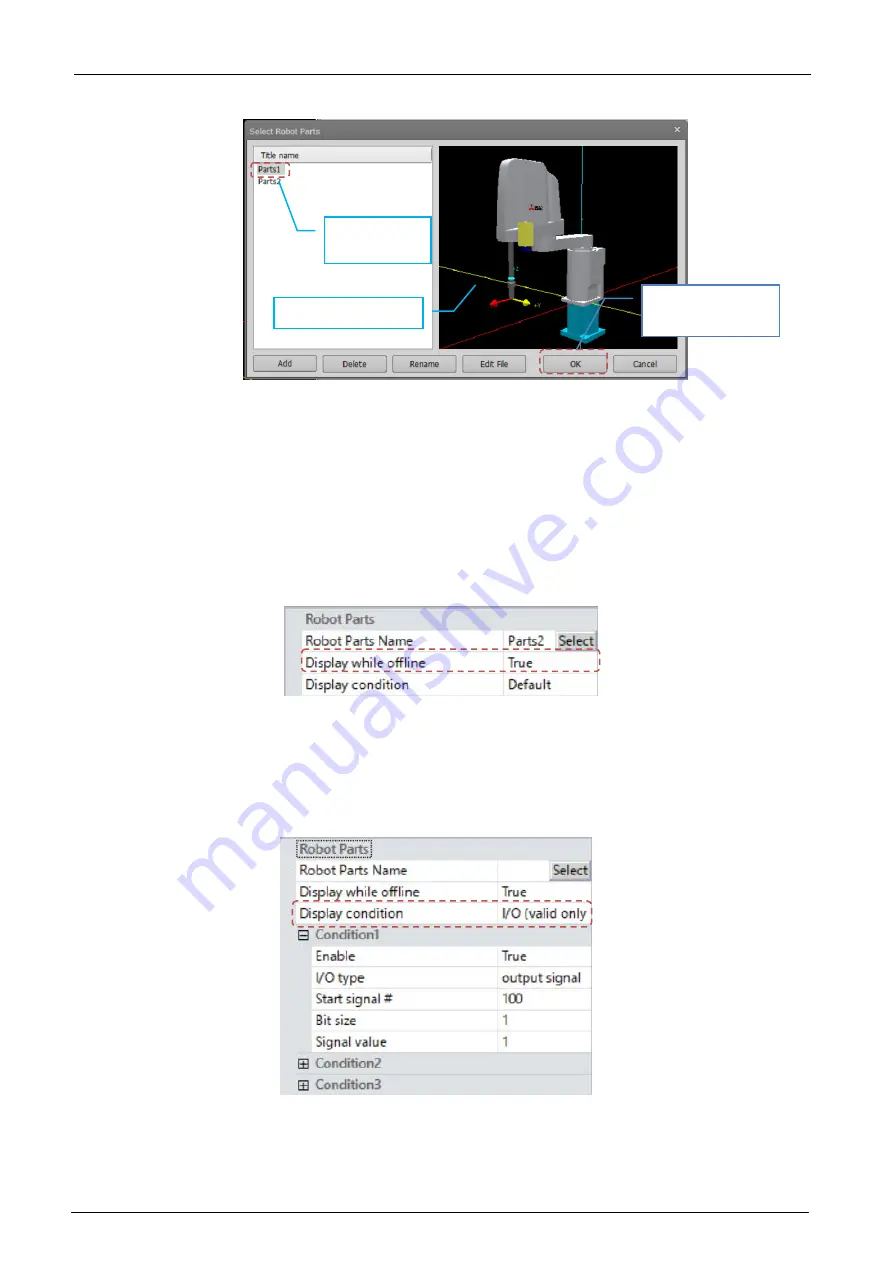
- Display conditions
Specify the I/O conditions for displaying the target hand file. This condition is valid only in the simulation mode.
To disable I/O conditions, select [Default], and to enable I/O conditions, select [I/O (valid only in simulation)].
When [I/O (valid only in simulation)] is selected, items [Condition1] to [Condition3] are displayed, and up to
three I/O conditions can be specified. The hand file is displayed when all respective conditions are satisfied.
Figure 21-74 Specifying I/O Conditions for Display of Robot Parts Files
(1) Enable:
Set [True] for only the number of I/O conditions to set.
Select robot
part file.
Check file content.
Set to display
content
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...
































































