





























21-504
21-504
21. 3D Monitor
You can display the robots and their movements in multiple projects in 3D to check them.
21.1. Starting Up 3D Monitor
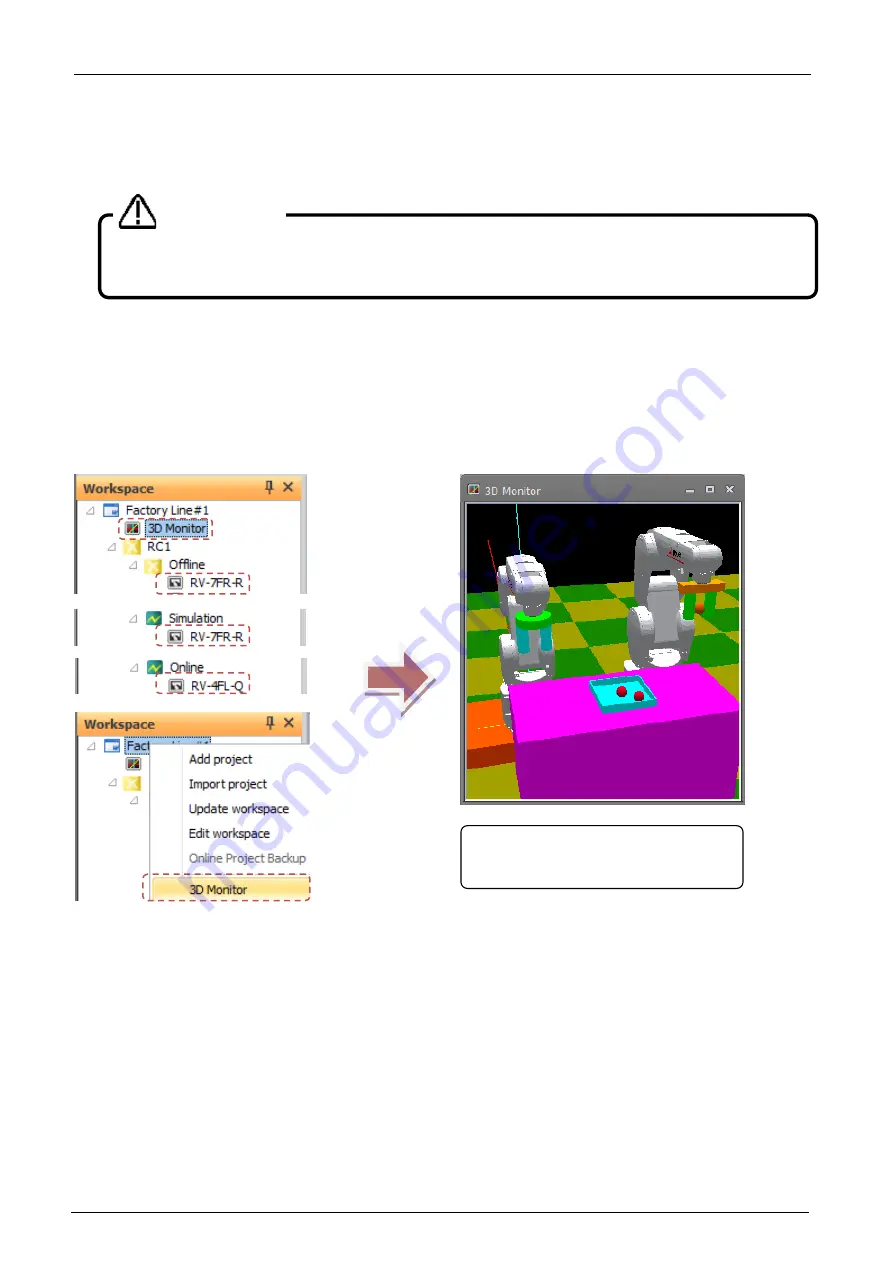
Either double-click [3D Monitor] or [Online]/ [Offline]/ [Simulation] -> [<Robot model name>] from the project tree
or select [3D Monitor] from the context menu. The 3D display for the selected robot is displayed in the "3D
Monitor" screen. If the "Travel base setting for display" is set to the project, the travel base also is displayed.
In the offline mode, the robot is basically displayed at its fixed posture.
Figure 21-1 Starting Up 3D Monitor
Double-click [3D Monitor] or
[robot model name, or select
[3D Monitor] in the context menu
When using the 3D monitor, we recommend using a high-performance PC.
Jog operation may not be performed properly if low-performance PC is used.
Caution
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...