





























19-484
19-484
19.5.1. Teach procedure by direct teaching
Teaching position to the robot program by direct teaching is possible by the following procedure.
①
Check that the mode selector switch input on the robot controller is set to "Automatic" and
operation mode is set to collaborative(standard or low speed).
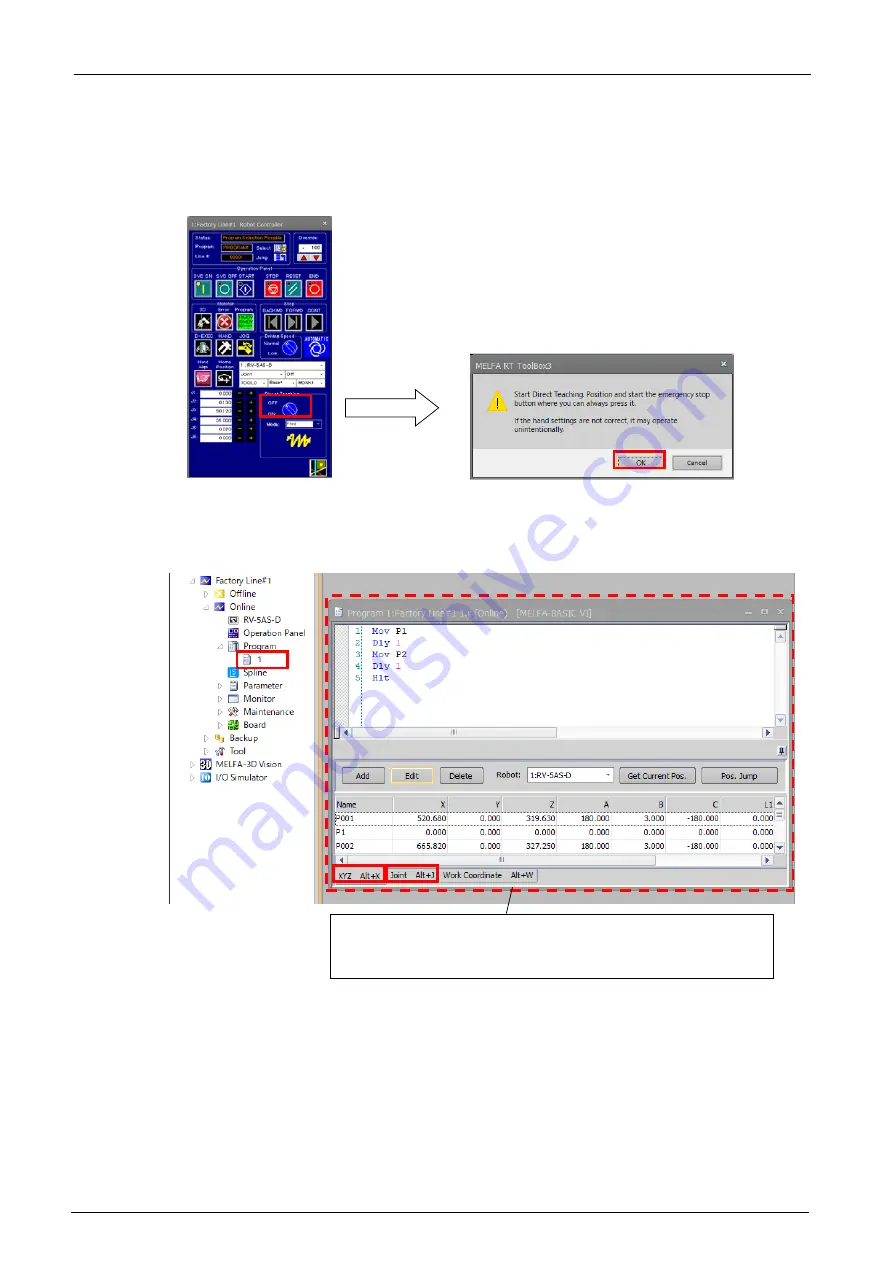
②
Open operation panel and click direct teaching switch.
Click the [OK] button on the confirmation screen to turn on the direct teaching.
③
Open the robot program to which teaches position data and select the XYZ or joint tab.
(Work coordinate position data cannot be taught by direct teaching.)
④
Hold the robot arm directly with your hand and move it to the destination position / posture, and
then press the [TEACH] button on the robot arm.
Bring the program edit screen to the front and make the screen
active. Please note that the position data cannot be taught if the
screen is not active.
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...