





























18-455
18-455
18.5.2. Operating procedure of 2D vision calibration
This section explains operating procedure of vision calibration
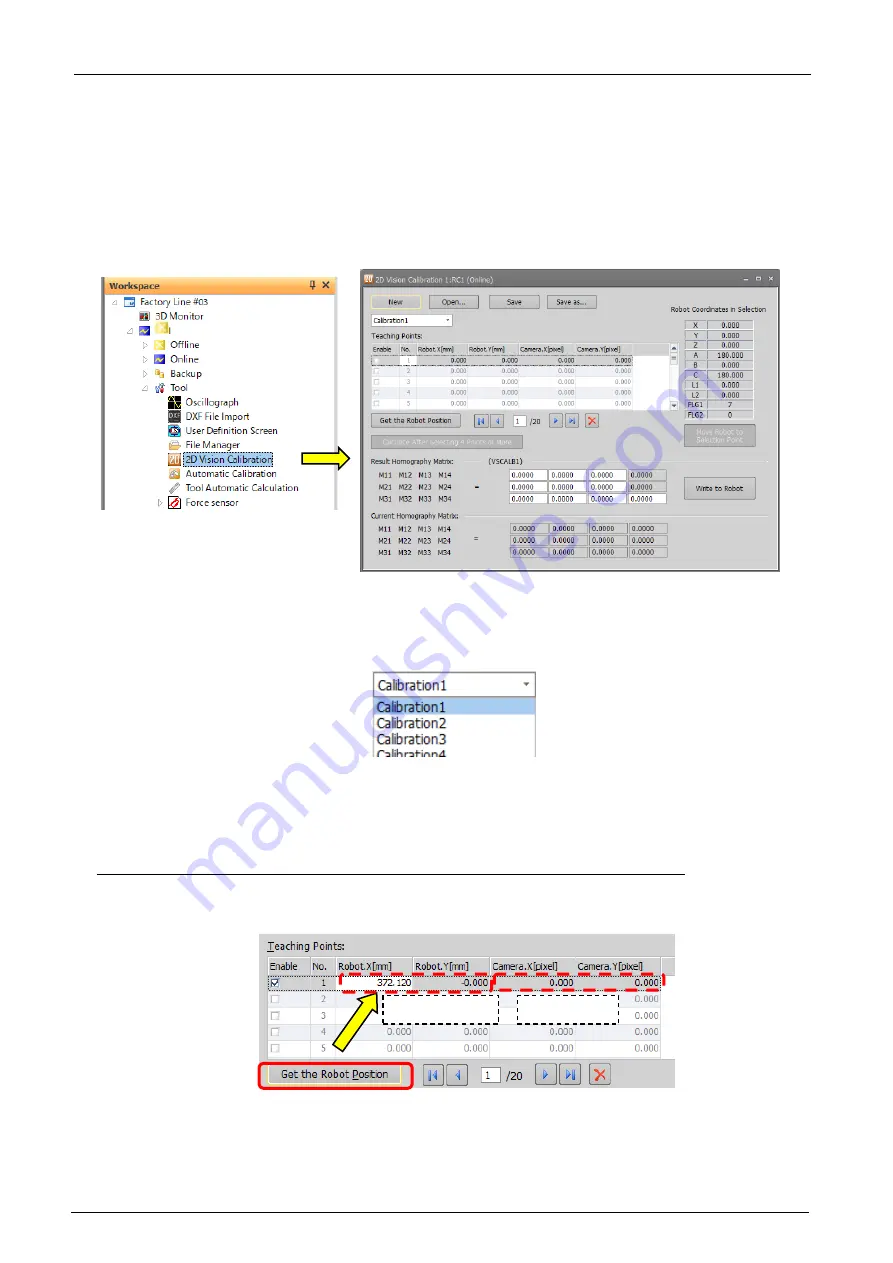
(1) Starting 2D vision calibration
Use this function while connected to a robot controller.
Double-click the target project [Tool] -> [2D Vision Calibration] on the project tree to start 2D vision calibration.
Figure 18-60 Starting 2D vision calibration
(2) Select calibration number
Select the tab of a desired number.
The maximum number of calibration settings combo box switchingly usable is 8.
Figure 18-61 Calibration number tab
(3) Teaching points
Click the row which you want to teach a point, to move the selected line cursor.
Position the tool center point at the calibration marker.
Click the [Get the robot position] button to get the current robot position.
Robot.X and Robot.Y in the selected row are filled in and the [Enabled] checkbox is checked automatically
You cannot edit teaching points before clicking the [Get the robot position] button.
Measure the position of the calibration marker with the vision sensor.
Enter the X, Y pixel coordinate positions in Camera.X and Camera.Y respectively.
For the method of getting the pixel coordinates, refer to your vision sensor’s manual.
Figure 18-62 Input teaching points
If the combination of vision sensor coordinates and robot coordinates is wrong or the teaching points are closely
spaced, incorrect calibration data may be calculated.
Vision calibration needs a minimum of 4 teaching points. For accurate calibration, 9 or more points arranged
Automatic input
Manual input
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...