





























18-411
18-411
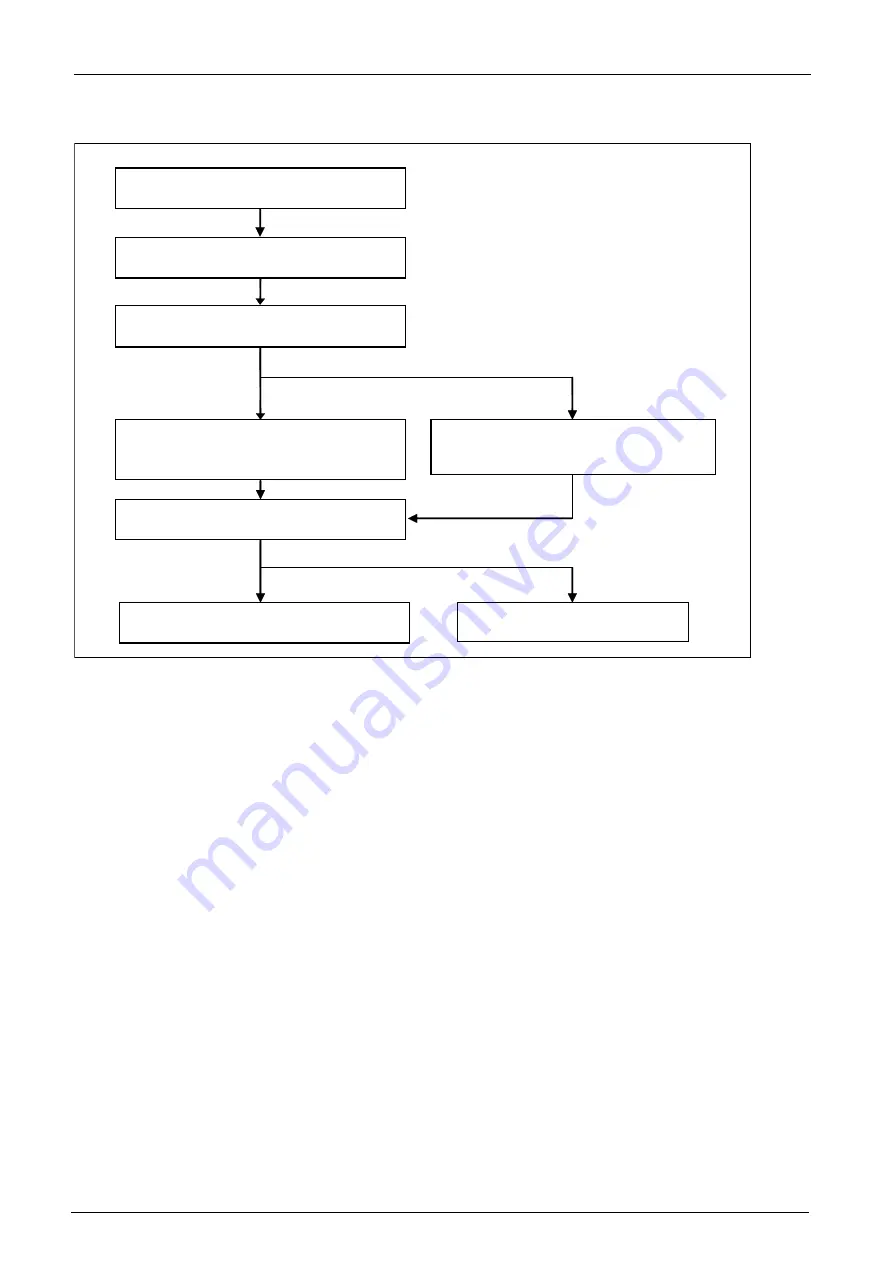
18.2.3. Flow of operations
Select a DXF file to be imported
<a>
Spline file output <g>
Select the layer to be imported <b>
Setting of the gripping position of the imported
entity and Ex-T coordinates <d>
Set the posture of each point <f>
Select the entity you want to import <c>
Calibration performed for coordinate
transformation <e>
Use the Ex-T control
Not use EX-T control
Spline file selection
Robot program output <h>
Robot program selection
Figure 18-22 Flow of operations
For detailed operation method of <a> ~ <f>, refer to
"7.4.5 Creating a spline file (2) Creating with DXF file
import function"
in the robot controller owner's manual.
<g> Output to spline file
Select the
[Spline file]
as the output format in the
[Generated Points]
page and click the
[Finish]
button.
The
spline file edit screen opens, and the generated point sequence data will be output. Click the
[Yes]
button in the
import completion message to display the spline file save dialog. Specify the spline file number you want to save
and click the
[Save]
button to save the spline.
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...







































































