




























11-195
11-195
11.15. Position data editing for SQ Direct
SQ Direct File is available in all versions of CR800-R/CR800-Q series controllers and in software version N8 or
later on CR750-Q/CRnQ-700 series controllers. To use this function, you must set the parameter of controller.
Available position data for SQ Direct is only 999 points of XYZ-origin whose position number is 1 to 999.
These numbers are used as external position number P_DM (1) to P_DM (999) in controller.
SQ Direct position data can edit online and offline.
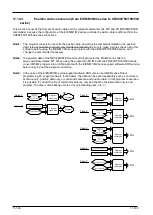
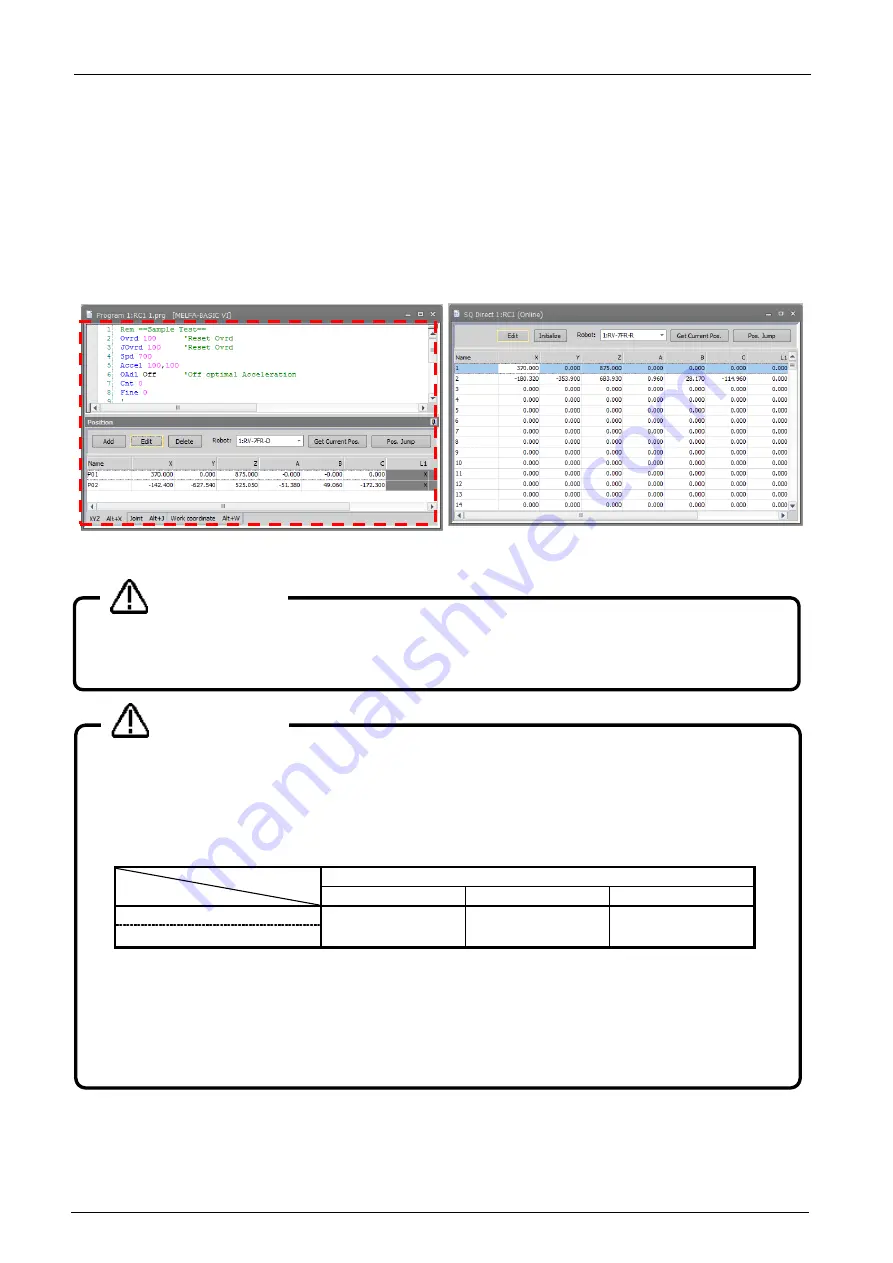
In the position data editing screen for the SQ Direct, command lines and joint (J) /work coordinate (W) variable
lists are omitted unlike the program edit screen.
Figure 11-98 Program editing and position data editing screen for SQ Direct
As editing SQ Direct is similar to XYZ coordinate editing in program editing, the following page explains
only the different function. For details on the operations for opening a program, see 11.7 Program
Editing.
Caution
When the password is registered in “program” by robot controller's
security function, the position data for SQ Direct cannot be read or written.
When the password is registered in “program” by the robot controller's security function, the position
data for SQ Direct cannot be read from the robot controller or written to the robot controller.
○
: Enable
、
×
: Disable
Item to which password of security function is registered.
Program
Parameter
File
Position data writing
×
○
○
Position data reading
Delete the password of the robot controller's security function when you operate these. Refer to
for the method of deleting the password.
For details on setting security functions (registering passwords) and releasing security functions
(deleting passwords) on robot controllers, refer to "
Table 15-12 Compliant version of this function
Caution
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...







































































