





























18-454
18-454
18.5. 2D vision calibration
This section explains the 2D vision calibration function.
18.5.1. Summary
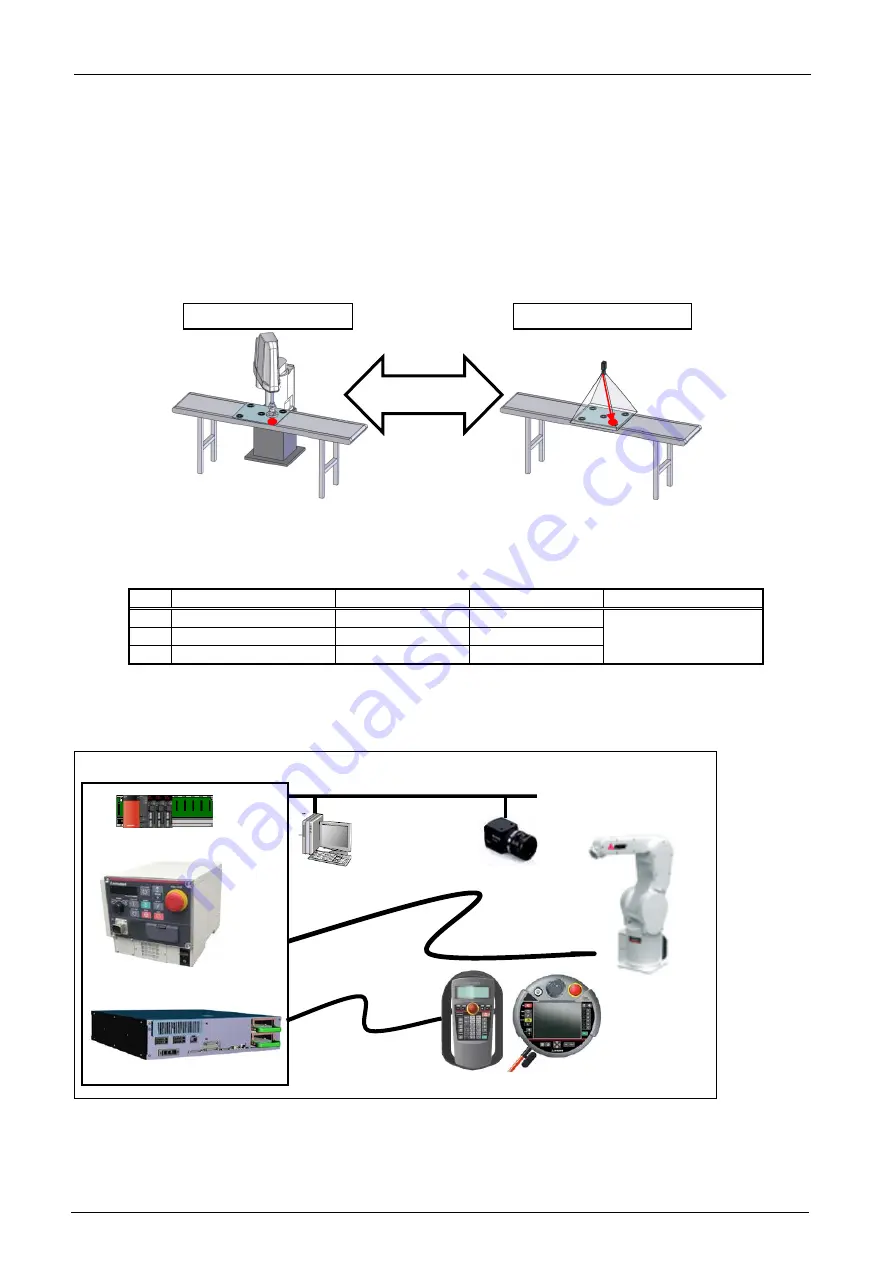
(1) Summary
2D vision calibration is a function to determine the relationship between the vision sensor’s coordinates and
the robot’s coordinates. You can have up to 8 switchable vision calibration data sets.
(2)
Figure 18-58 Summary of 2D vision calibration
The software version of the controller which can use this function is as follows.
Table 18-13 Supported robot controllers and model
No.
Model
CR800
CR750/700
CRn-500
1
Vertical 6-axis robot
All versions
R5/S5 or later.
Not available.
2
Vertical 5-axis robot
All versions
R5/S5 or later.
3
Horizontal 4-axis robot
All versions
R5/S5 or later.
(3) System components
The figure below shows the system components.
Perform the connection of the equipment before using this function Refer to the instruction manual of your
vision sensor.
R32TB/R33TB or
R56TB/R57TB
PC
Robot
CRnD / CRnQ-700
Q172DRCPU
CR75x-Q / CR75x-D
Vision sensor
Ethernet
(
TCP/IP
)
Windows / RT ToolBox2
Robot controller
Figure 18-59 System component of 2D vision calibration
Robot
’
s coordinates
Vision sensor
’
s coordinates
Determining
the relationship
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...






































































