





























21-587
21-587
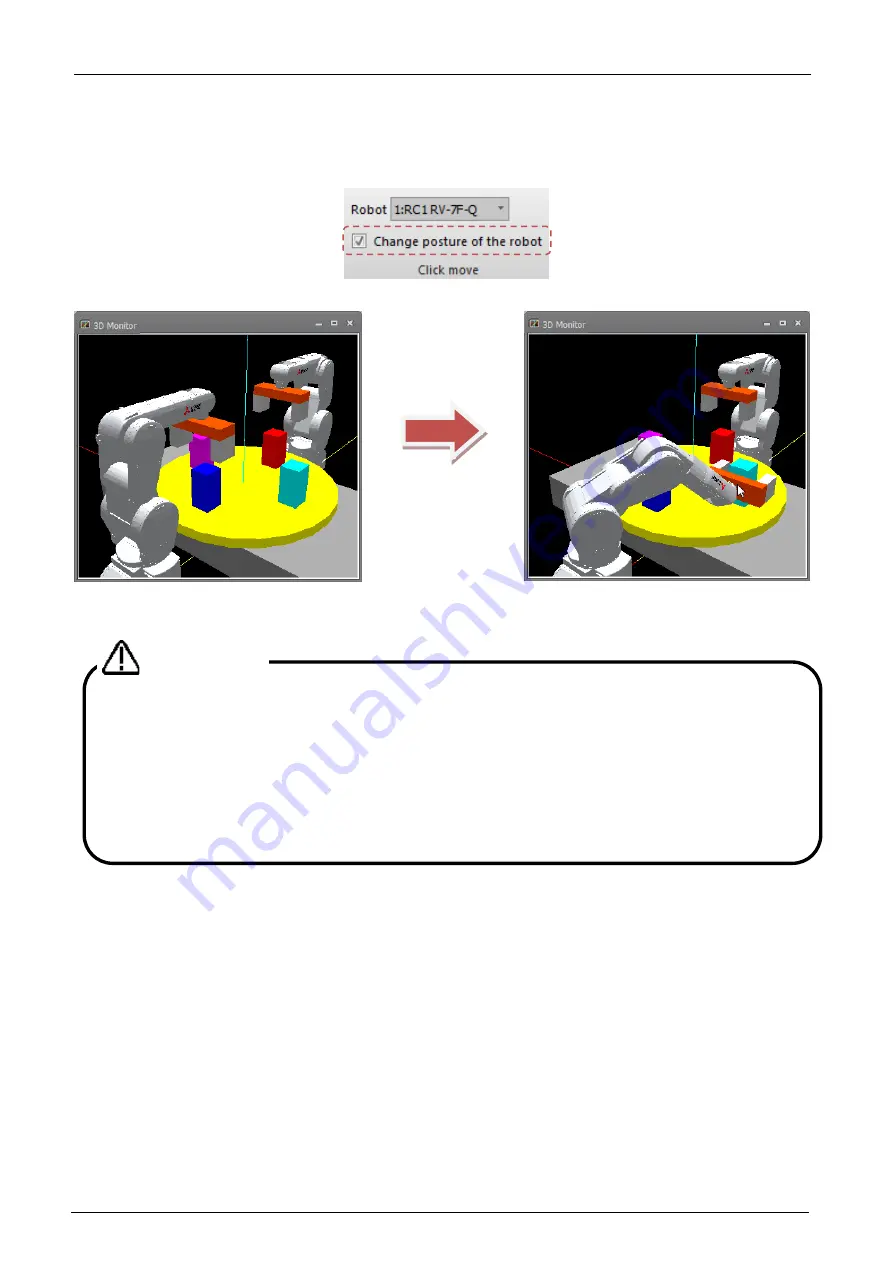
Also, if you click an object on the 3D monitor with the [Ctrl] key held down with the [3D view] tab -> [Click move]
group -> [Change posture of the robot] on the ribbon selected, the control point of the robot will move to the
clicked position, and the posture will be changed to one where the normal direction of the click surface matches
the Z-axis direction of the tool coordinate system.
Figure 21-118 Setting to Match the Posture with the Normal Direction of the Click Surface
Figure 21-119 Click Move Operation for Matching the Posture with the Normal Direction of the Click Surface
Click with [Ctrl] key
held down
・
This function is available only on vertical 6-axis robots.
On other models, the robot moves to the clicked position with its current
posture held intact.
・
The target posture is sometimes not attained depending on the current
posture before click move operation.
In this case, bring the current posture close to the target posture, and then
perform click move.
Caution
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...







































































