





























18-407
18-407
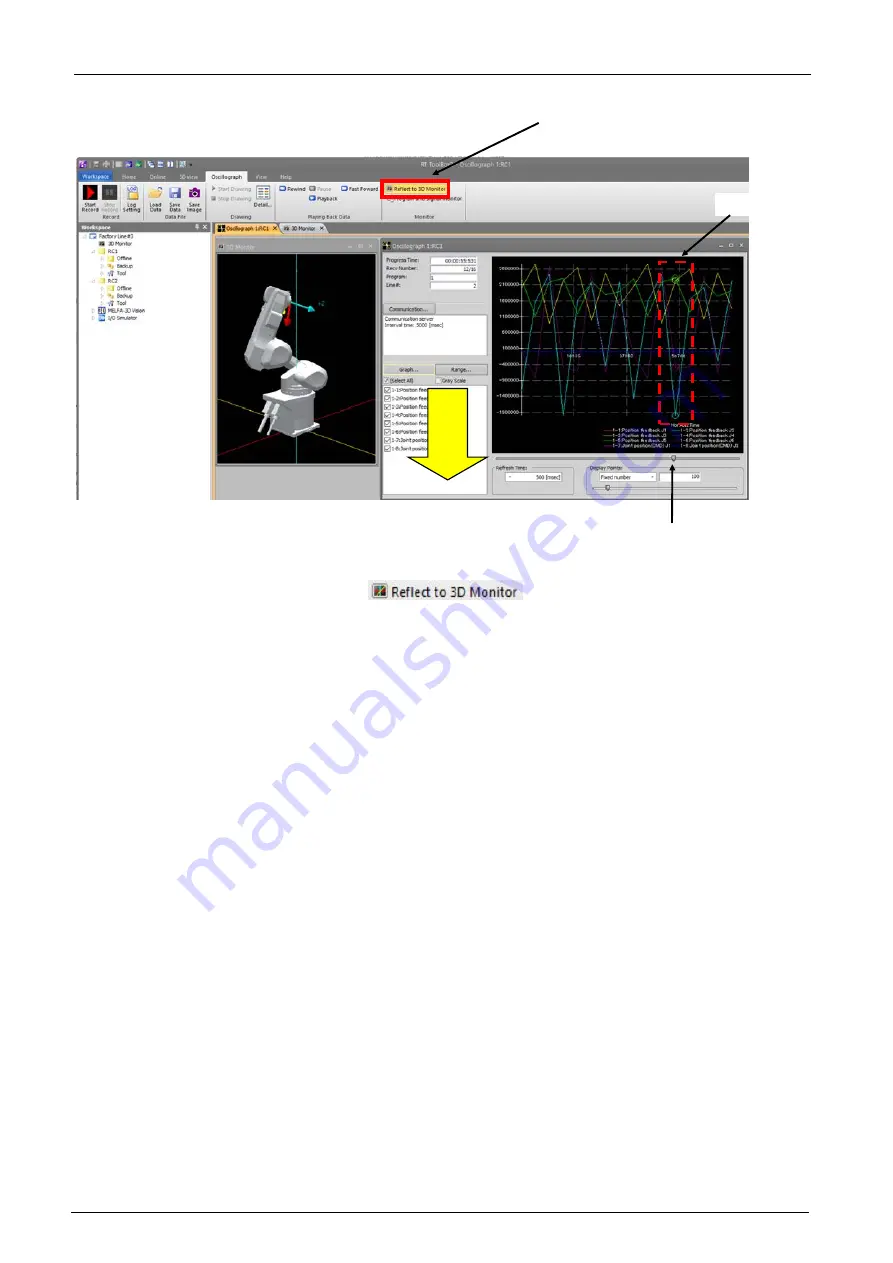
Figure 18-18 Operation of reflected to the 3D monitor
Clicking the [
Reflect to 3D monitor
] button (
) and pushing down, the joint position (FB) or
the joint position (CMD) selected by the cursor<b> is reflected in the 3D monitor.
By moving the cursor<b> with the slider, you can change the posture of the robot in the 3D monitor.
You cannot click the [
Reflect to 3D monitor
] button if the log data that you acquired from the robot includes
neither the joint position (FB) nor the joint position (CMD).
The joint position (FB) is reflected in the 3D monitor if the log data that you acquired from the robot has both the
joint position (FB) and the joint position (CMD).
You cannot click the [
Reflect to 3D monitor
] button if the robot model displaying log data in the oscillograph
screen does not match the robot model set in the project. In this case, it is necessary to change the robot model
in the project to match the robot model set in the log data.
<b>
[
Reflect to 3D monitor
] button
<a>
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...


































































