





























19-472
19-472
(2) Move method
Select the robot move method. The move methods shown below can be selected.
For details on each jog operation, refer to
"Detailed Explanations of Functions and Operations"
in the robot
controller instruction manual.
Move method
Joint
XYZ
TOOL
3-axis XYZ
Cylinder
WORK
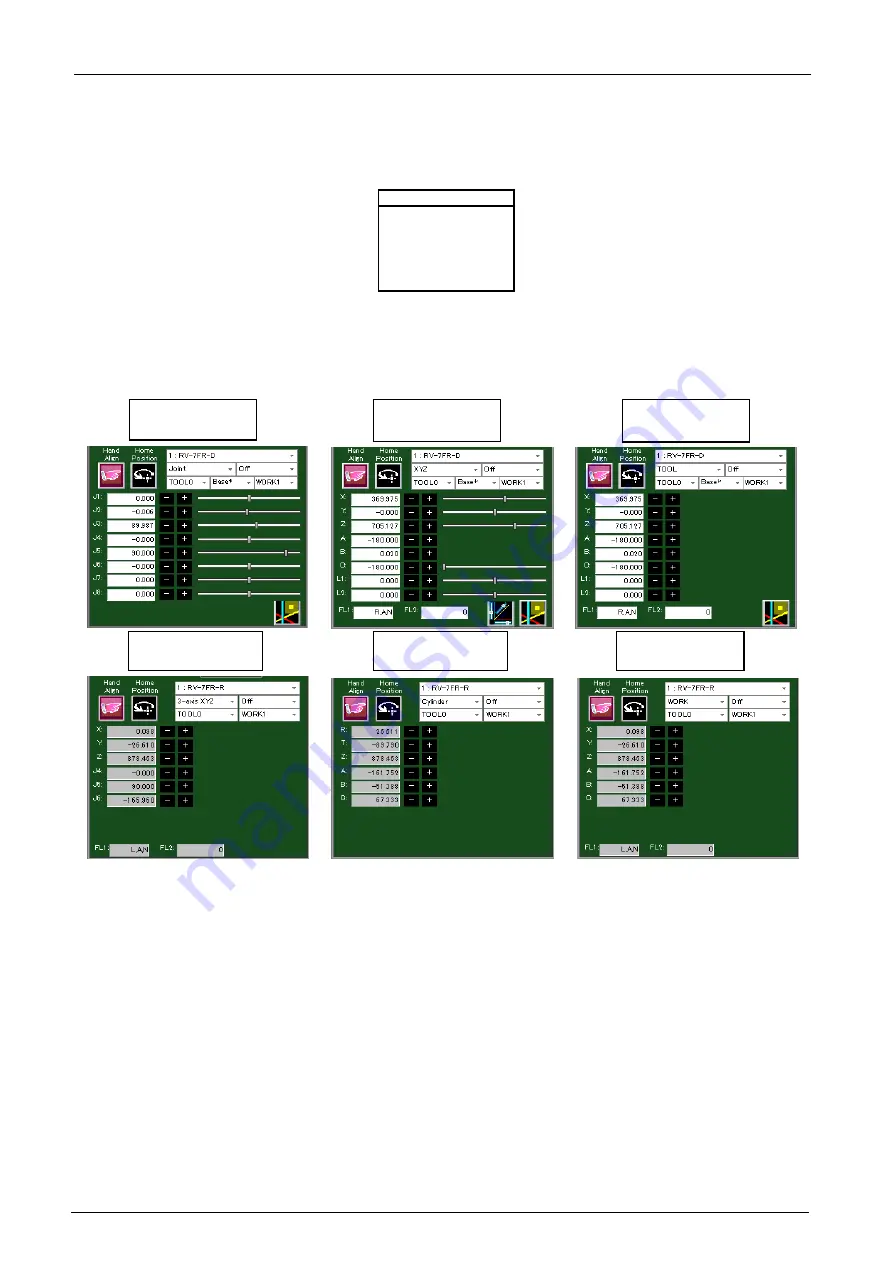
The display of the robot current position and the jog operation button for each axis varies according to the
move method selected here. Also, these displays vary according to the axis configuration of the connected
robot. Operation by slider bar is enabled only in the simulation mode. On actual robot controllers, the slider bar
is not displayed.
Figure 19-6 Changes in Screen for Jog Operation According to Move Method Selection
(3) Movement distance setting
This selects the robot move distance. Selectable move distances are "off", "High", and "Low".
For details on move distances, refer to
"Detailed Explanations of Functions and Operations"
in the robot
controller instruction manual.
(4) Change TOOL
Select the TOOL of robot. The tools that can be selected differ according to the specifications of the connected
robot.
(5) Change Base
Select the base coordinate number of the robot. It can be selected are “Base 0” to “Base 8”.
"Base *" will be displayed if base is switched by not using base coordinate number.
It cannot be used on a controller that does not have the base coordinate number parameter (MEXBSNO).
(6) Change WORK
This selects the workpiece when moving the robot by "WORK JOG". The workpieces that can be selected are
"WORK1" to "WORK8".
When "Joint" is
selected
When "XYZ" is
selected
When "TOOL" is
selected
When "WORK"
is selected
When "3-axis
XYZ" is selected
When "Cylinder"
is selected
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...





































































