





























18-466
18-466
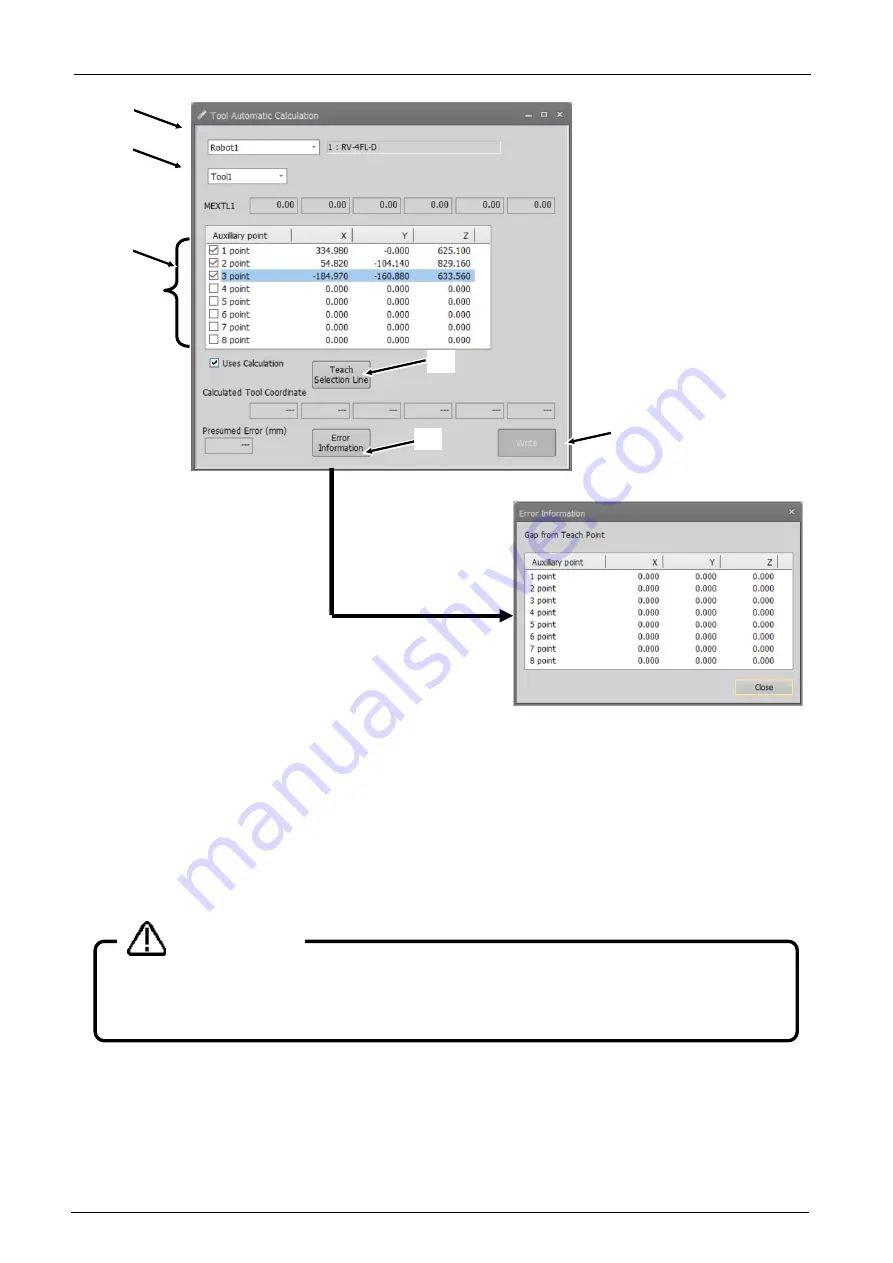
Figure 18-74 The “Tool automatic calculation” screen
Select the robot (<a>) and the tool number (<b>).
Move the robot with a tool mounted. Select a line of the “Auxiliary point” list (<c>) and click the [Teach selection
line] button (<d>). It will teach the same position at 3 to 8 points with different postures.
When a value is set in “Calculated tool coordinate”, the [Write] button (<e>) becomes effective. When the [Write]
button (<e>) is clicked, the values of a tool parameter (MEXTL) are written to the robot controller.
When the [Error information] button (<f>) is clicked, it is possible to check the deviation from a teaching point.
<d>
<a>
<b>
<e>
<c>
5
<f>
Teach the position by greatly varying the posture of the robot.
The tool coordinates might be not computable if the postures are similar. (e.g. when only A axis is
different)
Caution
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...