





























15-332
15-332
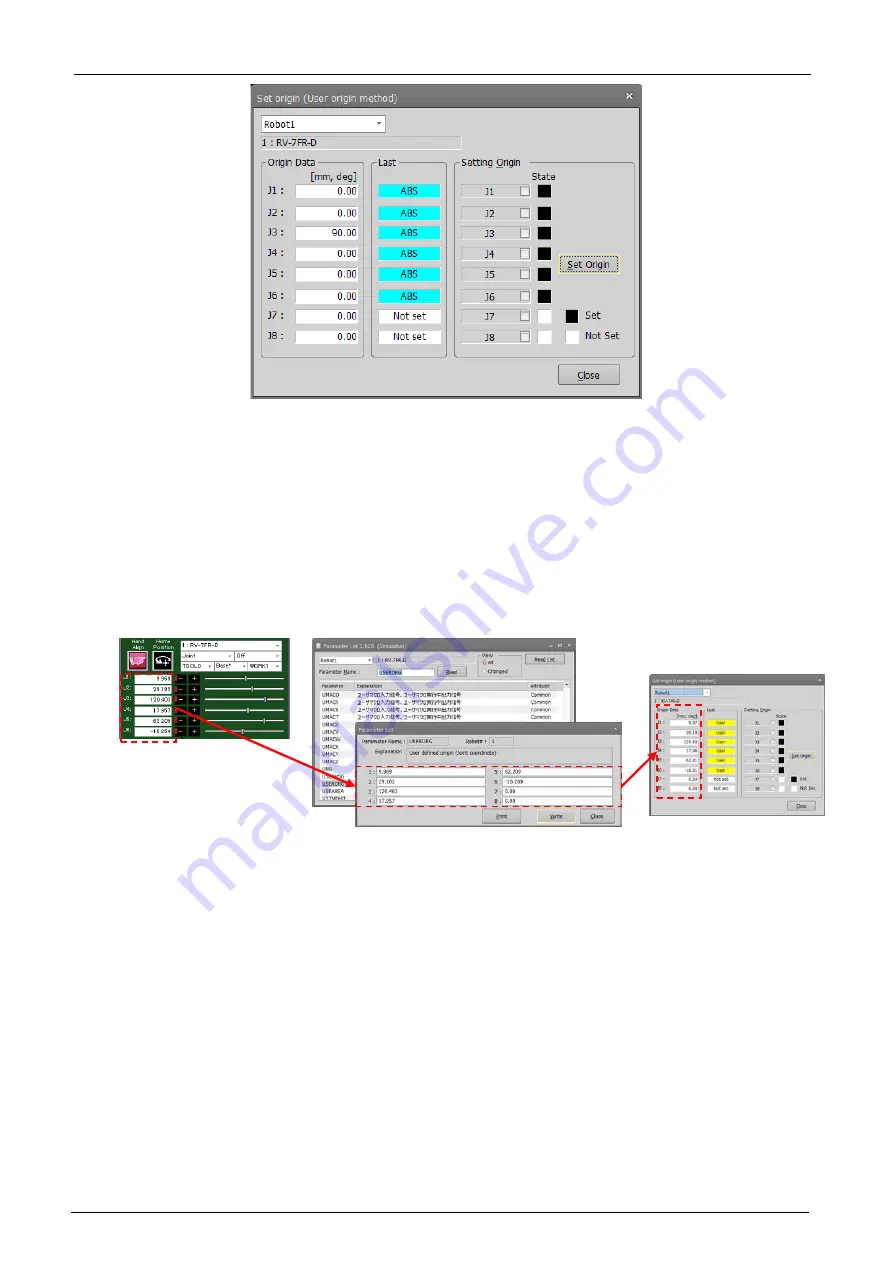
Figure 15-7 Origin Setting (User Origin Method) Screen
In this method, we use the user-determined origin position and the joint value at that time to set the origin.
However, before using this method, you need to use other methods to preset the origin. Please follow the
procedure below.
< When the origin setting is the first time >
1) Move the robot by jog operation and decide the posture to be the user origin. At this time, please put a
landmark so that you can move to the same posture again by jog.
2) Write the user-specified origin position parameter (USERORG) after recording the current joint value read
from T/B or RT ToolBox3. This operation associates the current pose with the joint value and displays it as the
origin data on the origin setting (user origin method) screen.
< When the origin setting is the second time or later >
3) Move to the posture decided in 1.
4) Select the axis form the above screen and click the [Set Origin] button. By this operation, the current posture
is set as the joint value determined in 2.
* Please refer to [Robot Setup to Maintenance].
Posting
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...