





























19-474
19-474
(12) Position value specified move
You can move the robot by specifying the joint or XYZ coordinates directly.
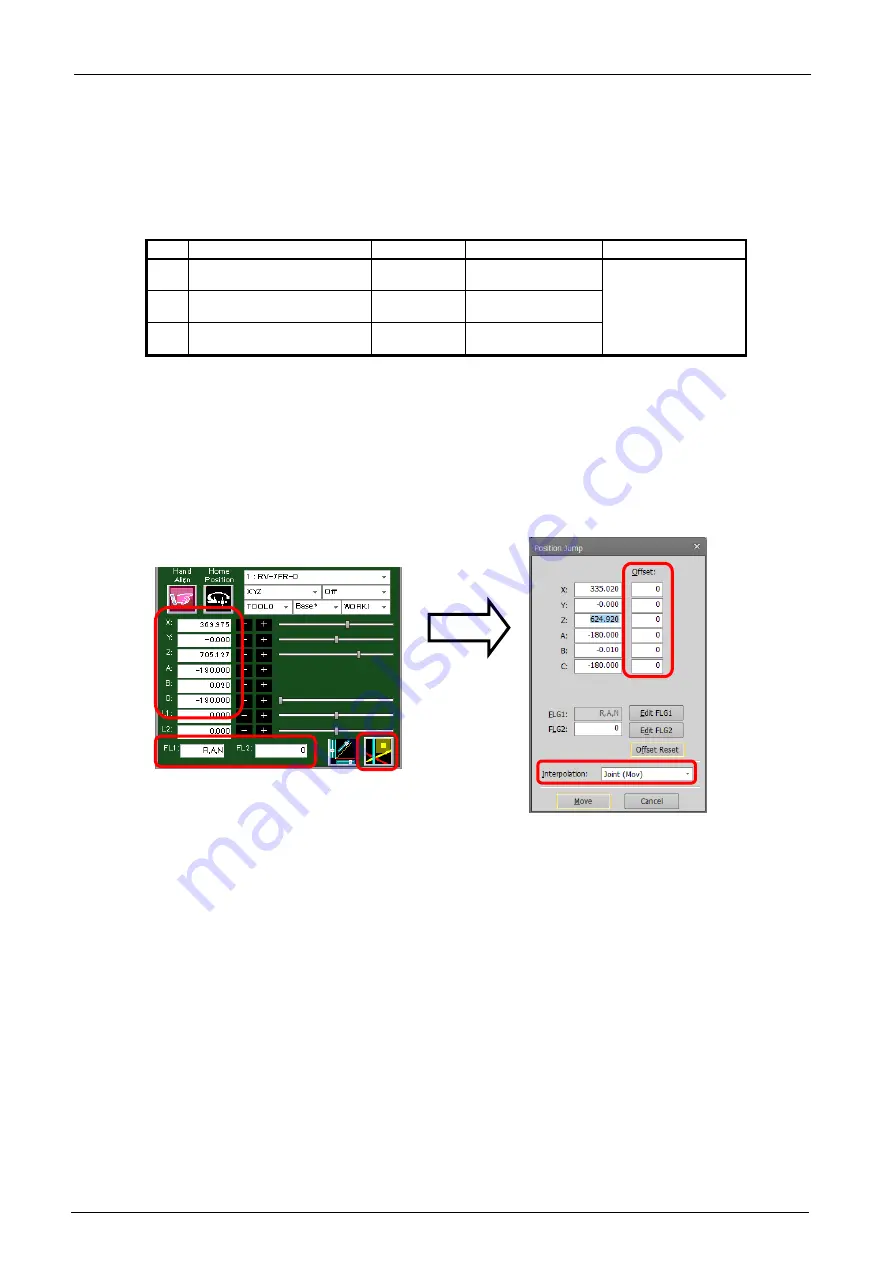
When you double-click the coordinate value display part on the joint or XYZ jog screen or click the [P.Jump]
button, the "Position Jump" screen corresponding to the jog mode will be displayed. When you enter the
coordinate value in this screen, the robot will move to that position.
Coordinate value specification model and robot controller version are available below.
In the case of simulation, this function can be used regardless of the following model or robot controller.
Table 19-2 Supported robot controllers and model
No.
Model
CR800
CR750/700
CRn-500
1
Vertical 6-axis robot
All versions
R3e/S3e or later
Unavailable
2
Vertical 5-axis robot
Unavailable
Unavailable
3
Horizontal 4-axis robot
All versions
R3e/S3e or later
If the entered position is outside the movement area of the robot, the robot will not move.
This operation is invalid while the robot is running.
If you are using a vertical 5-axis robot, the 6th axis in FLG2 cannot be used.
You can specify "offset" to specify relative movement amount. When you click the [Offset] button, the input
value of the offset returns to 0.
As the "Interpolation" can choose Joint (Mov) ,Linear (Mvs) ,Arch(Mva) and Direct.
Direct can only be selected during simulation.
Figure 19-8 Operation of Position Value Specified Move
Double-click the
coordinate value
area
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...




































































