





























13-248
13-248
13.5.2.5. Hand parameters
エラー
!
ブックマークが定義されていません。
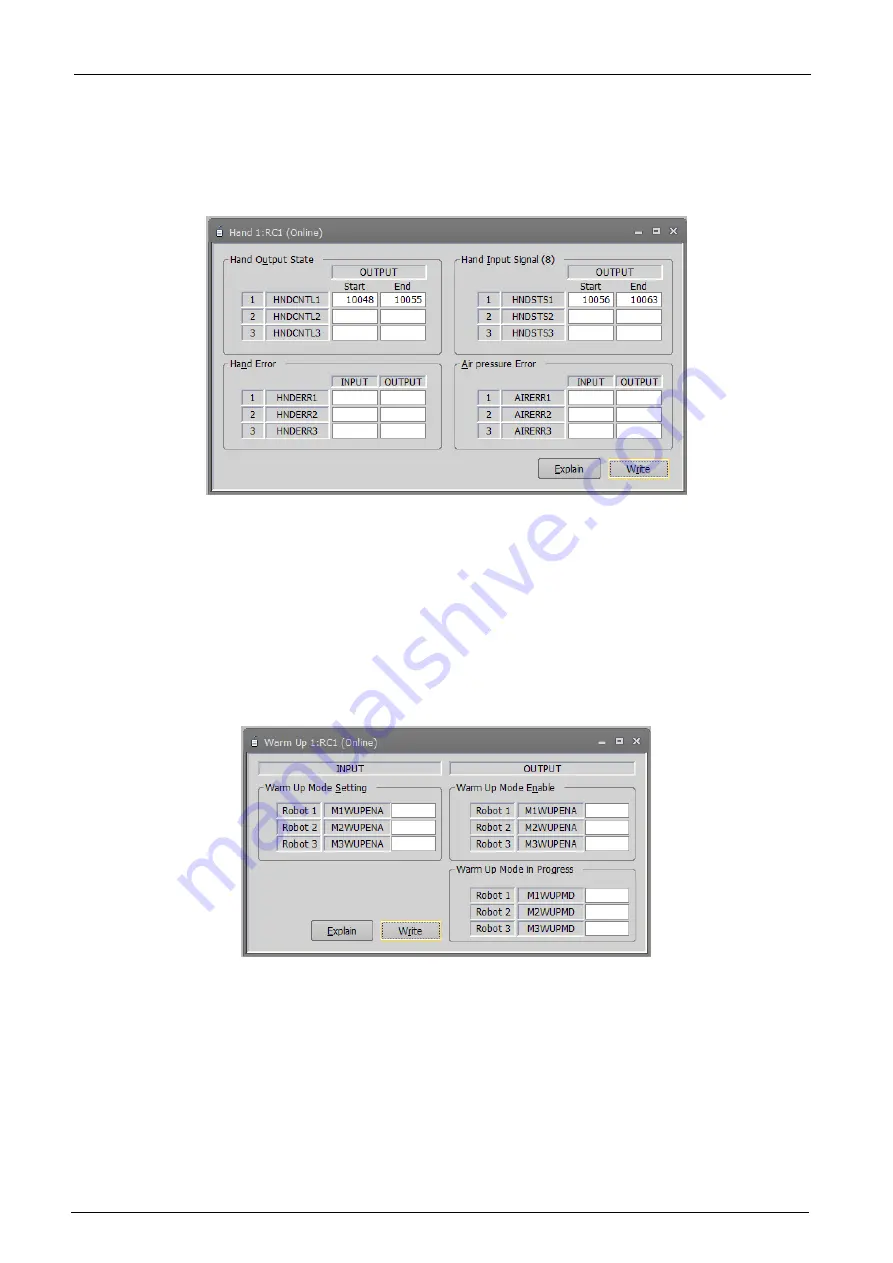
Double-click [Signal Parameter] -> [Dedicated Input/Output Signals Assignment] -> [Hand] under the [Parameter]
item to be edited from the project tree.
After you change a parameter value, you can rewrite the parameters in the robot controller by clicking the [Write]
button.
Figure 13-56 Dedicated input/output signals assignment - Hand parameter
You can reference explanations of the displayed parameters by pressing the [Explain] button.
13.5.2.6. Warm up parameters
The warm-up operation parameters can be set when you are connected to a CRn-500 series robot controller ofJ8
edition or later or a CR800/750/700 series robot controller.
Double-click [Signal Parameter] -> [Dedicated Input/Output Signals Assignment] -> [Warm Up] under the
[Parameter] item to be edited from the project tree.
After you change a parameter value, you can rewrite the parameters in the robot controller by clicking the [Write]
button.
Figure 13-57 Dedicated input/output signals assignment – Warm up parameter
You can reference explanations of the displayed parameters by pressing the [Explain] button.
Summary of Contents for 3F-14C-WINE
Page 84: ...8 84 8 84 Figure 8 21 Parameter transfer procedure 1 2 2 ...
Page 393: ...18 393 18 393 Figure 18 1 Starting the Oscillograph ...
Page 413: ...18 413 18 413 Figure 18 24 Output to Robot program Selection ...
Page 464: ...18 464 18 464 Figure 18 72 Starting the Tool automatic calculation ...
Page 545: ...21 545 21 545 Figure 21 55 Hide display of user mechanism ...
Page 624: ...24 624 24 624 Figure 24 4 Document output example ...







































































