





























DVP-15MC Series Motion Controller Operation Manual
11-190
11
1
MC
_CamIn
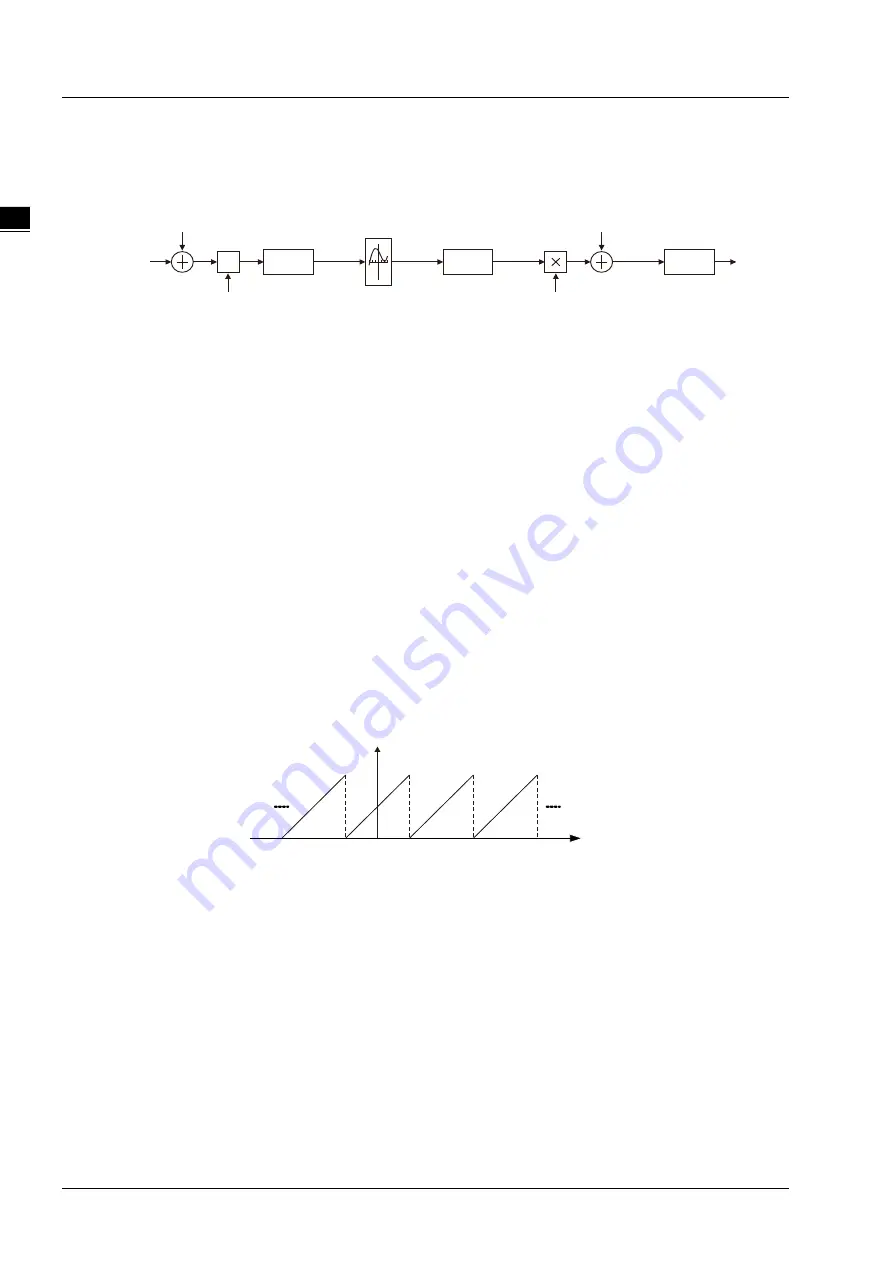
instruction. In the synchronous cam motion, the corresponding relationship between
the master axis position and slave axis position is based on the pre-planned cam relationship (the
cam curve or cam table). The process in which the slave axis position is calculated through the
master axis position is illustrated as follows.
Ma ste r axis
p osition
%
Mast er
Abs olute
Mas ter a xis
ca m phas e
CA M
Slave axis
c am pha se
S la ve
A bs olu te
Original v alue of
Slav e pos it ion increme nt
F in al value o f
s la ve po sition inc rement
Ca lc ulate slav e
ta rg et pos ition
Slave ax is
posit io n
Mas te r Of fse t
Mas ter S caling
Slav e Off set
S la ve Sc alin g
MasterAbsolute and SlaveAbsolute
The
MasterAbsolute
parameter is used for specifying the corresponding relationship between the
master axis position and the cam phase. As
MasterAbsolute
is TRUE, the master axis position and the
cam phase are in an absolute relationship. As
MasterAbsolute
is FALSE, the master axis position and
the cam phase are in a relative relationship. For
SlaveAbsolute,
the explanation is similar to that of
MasterAbsolute
.
MasterAbsolute
and
SlaveAbsolute
work at the moment when the engagement starts. That is to say
that the corresponding relationship between the axis position and cam phase is built at the beginning
of the engagement. (
NOTE:
The corresponding relationship is not built at the time when the
MC_CamIn
instruction execution begins but when the engagement begins.) After that, the cam phase
is calculated according to the corresponding relationship.
Relative mode
The master axis position and its cam phase are in the relative relationship as the
MasterAbsolute
parameter is FALSE. That is to say, the master axis position corresponds to its cam phase 0 at
the time when the engagement starts. After that, the master cam phase will be calculated
according to the corresponding relationship. For example, the master axis is in relative mode, the
maximum value of the master axis cam phase in the cam relationship is 360 and the master axis
position is 180 at the time when the engagement starts. So the master axis position 180
corresponds its cam phase 0; the master axis position 200 corresponds to its cam phase 20 (20=
(200-180) %360) and so on.
In this circumstance, the master axis position corresponds to its cam phase as shown in the
following figure.
As the
SlaveAbsolute
parameter is FALSE, the slave axis position and its cam phase are in the
relative relationship. That is to say, the slave axis cam phase and the master axis cam phase
meet the planned cam relationship at the time when the engagement starts. If the slave axis is in
relative mode, the method of being sure of the slave axis cam phase is different from the master
axis. When the slave axis cam phase is sure, it should meet the condition that the slave axis cam
phase and the master axis cam phase meet the planned cam relationship at the time when the
engagement starts.
For example, the slave axis is in relative mode, the maximum value of the slave axis cam phase
in the cam relationship is 360 and the slave axis position is 100 at the time when the engagement
starts. If the master axis cam phase is 0 at the moment (and the slave axis cam phase is 0 as
required in the cam relationship), the slave axis position 100 will correspond to its cam phase 0 as
shown in the following circumstance 1. If the slave axis cam phase is 200 as required in the cam
relationship, the slave axis position 100 will correspond to its cam phase 200 as shown in the
following circumstance 2.
M ast er ax is c am phas e
Mas t er ax is po sit i on
0
18 0
-1 80
-540
540
360
900
Summary of Contents for DVP-15MC Series
Page 19: ...DVP 15MC Series Motion Controller Operation Manual 1 4 _1 MEMO...
Page 23: ...DVP 15MC Series Operation Manual 2 4 _2 MEMO...
Page 31: ...DVP 15MC Series Motion Controller Operation Manual 3 8 _3 MEMO...
Page 75: ...DVP 15MC Series Motion Controller Operation Manual 6 26 _6 MEMO...
Page 87: ...DVP 15MC Series Motion Controller Operation Manual 7 12 _7 MEMO...
Page 432: ...Chapter 8 Logic Instructions 8 345 8_ MEMO...
Page 470: ...DVP 15MC Series Motion Controller Operation Manual 10 34 10 MEMO...
Page 878: ...DVP 15MC Series Motion Controller Operation Manual 11 408 11 1 MEMO...
Page 920: ...DVP 15MC Series Motion Controller Operation Manual A 16 A MEMO...
Page 941: ...D 1 D Explanation of Homing Modes Table of Contents D 1 Explanation of Homing Modes D 2...
Page 966: ...DVP 15MC Series Motion Controller Operation Manual D 26 D MEMO...







































































