





























Chapter 11 Motion Control Instructions
11-293
11
2.
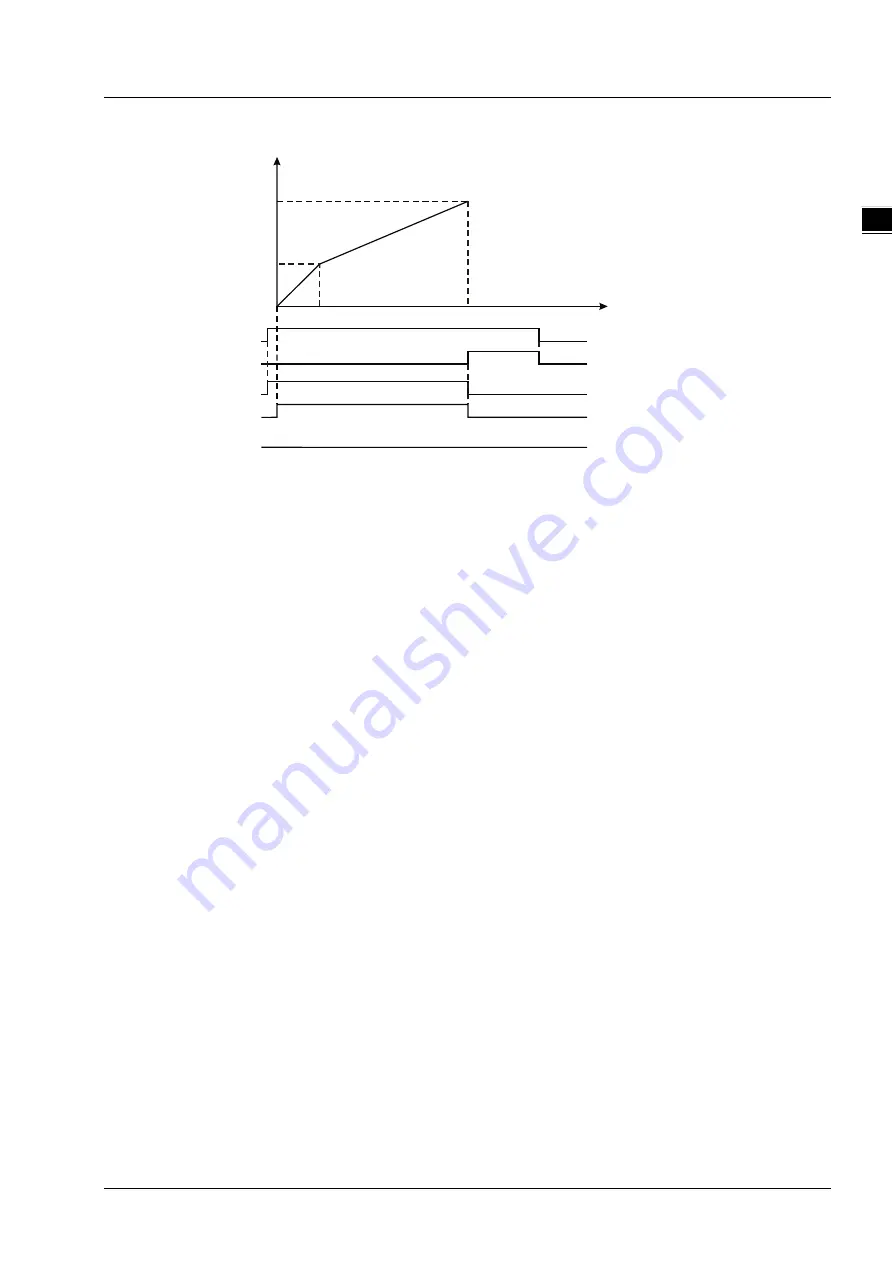
Motion Curve
Y axi s
1000
X a xis
5200
C C_Ex
CC_Err
CC_Done
CC_Bs y
CC_Ac t
0
1000
3500
When Pwr_En is set to TRUE, MC_Power instruction is executed to enable two axes. Then
ATG_Ex and ATG1_Ex are set to TRUE and DMC_AddAxisToGroup instruction is executed to
add Axis1 and Axis2 to the axes group Axes1. Afterwards, set SG1_Ex to TRUE to execute
DMC_SetG1Para instruction and set the default velocity of G1/G2/G3. At last, CC_Ex is set to
TRUE and DMC_ CartesianCoordinate instruction is executed to control axis 1 and axis 2 for
the interpolation based on the path planned via G codes.
When CC_Ex changes from FALSE to TRUE, DMC_CartesianCoordinate instruction is
executed. In the same cycle, CC_Bsy changes from FALSE to TRUE. In the second cycle,
CC_Act changes from FALSE to TRUE, the robot will move according to the path planned via
G code. After G code execution is completed, the output CC_Done changes from FALSE to
TRUE and meanwhile CC_Bsy and CC_Act change from TRUE to FALSE.
When CC_Ex changes from TRUE to FALSE, CC_Done changes from TRUE to FALSE.
Summary of Contents for DVP-15MC Series
Page 19: ...DVP 15MC Series Motion Controller Operation Manual 1 4 _1 MEMO...
Page 23: ...DVP 15MC Series Operation Manual 2 4 _2 MEMO...
Page 31: ...DVP 15MC Series Motion Controller Operation Manual 3 8 _3 MEMO...
Page 75: ...DVP 15MC Series Motion Controller Operation Manual 6 26 _6 MEMO...
Page 87: ...DVP 15MC Series Motion Controller Operation Manual 7 12 _7 MEMO...
Page 432: ...Chapter 8 Logic Instructions 8 345 8_ MEMO...
Page 470: ...DVP 15MC Series Motion Controller Operation Manual 10 34 10 MEMO...
Page 878: ...DVP 15MC Series Motion Controller Operation Manual 11 408 11 1 MEMO...
Page 920: ...DVP 15MC Series Motion Controller Operation Manual A 16 A MEMO...
Page 941: ...D 1 D Explanation of Homing Modes Table of Contents D 1 Explanation of Homing Modes D 2...
Page 966: ...DVP 15MC Series Motion Controller Operation Manual D 26 D MEMO...







































































