





























User Manual
51 of 562
V 1.0
2021-08-25
XDPP1100 technical reference manual
Digital power controller
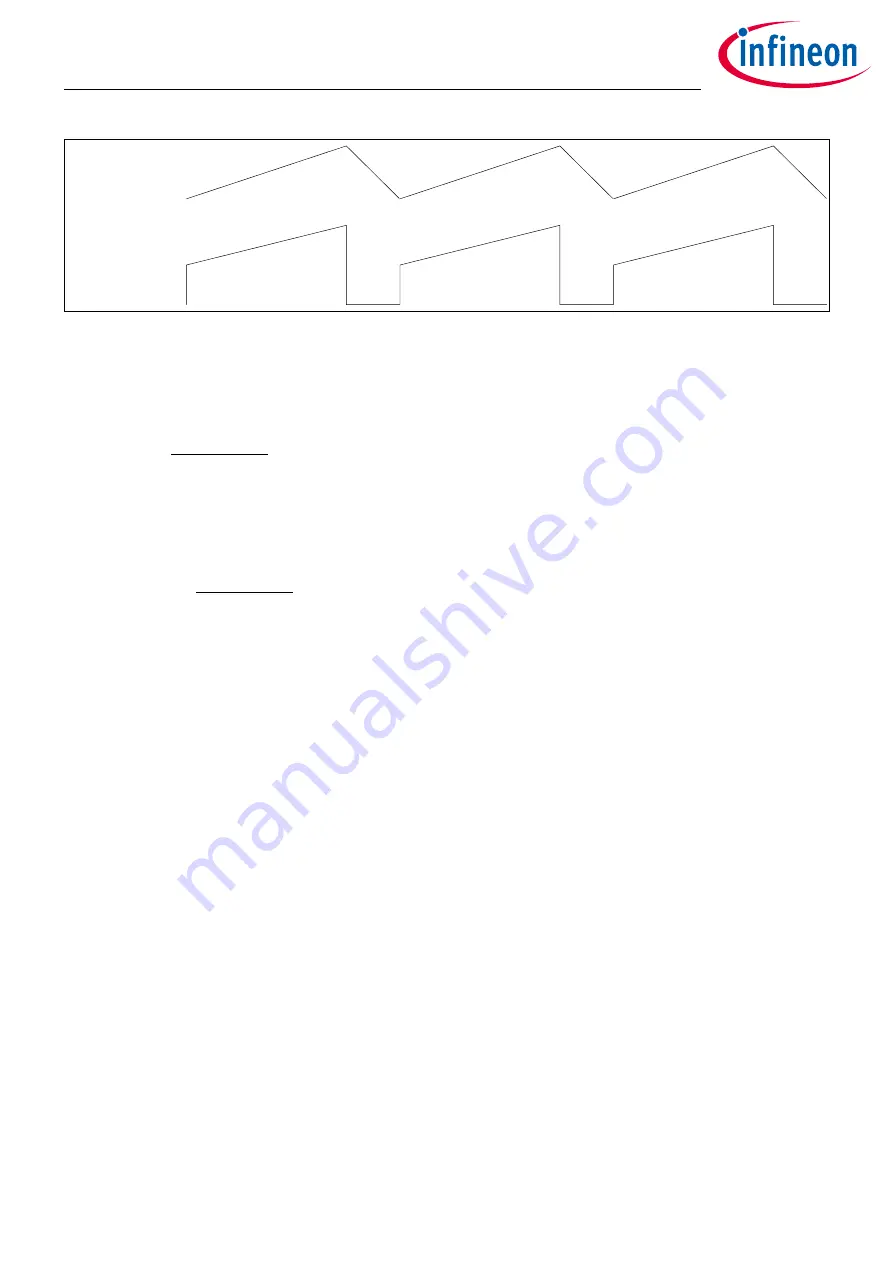
Current sense (IS)
Figure 28
Primary-side and secondary-side current waveforms
While determining the slope for the slope estimator, besides L
OUT
the magnetizing inductance must also be
considered. Therefore, Equation (3.3) is modified to consider the transformer turns ratio by computing the
parameter kslope_real according to Equation (3.6).
𝑘𝑠𝑙𝑜𝑝𝑒_𝑟𝑒𝑎𝑙 =
1.0𝑉∗10𝑛𝑠
𝑁
𝑡𝑢𝑟𝑛
∗𝐿
𝑂𝑈𝑇
∗𝐴𝑃𝐶
(3.6)
The transformer magnetizing inductance contribution can be defined via register
ceX_kslope_lm
according to
Equation (3.7), where the parameter kslope_lm_real is given in Equation (3.8).
𝑐𝑒𝑋_𝑘𝑠𝑙𝑜𝑝𝑒_𝑙𝑚 = 𝐼𝑁𝑇(𝑘𝑠𝑙𝑜𝑝𝑒_𝑙𝑚_𝑟𝑒𝑎𝑙 ∗ 2
13
)
(3.7)
𝑘𝑠𝑙𝑜𝑝𝑒_𝑙𝑚_𝑟𝑒𝑎𝑙 =
1.0𝑉∗10𝑛𝑠∗𝑁
𝑡𝑢𝑟𝑛
𝐿
𝑚
∗𝐴𝑃𝐶
(3.8)
Where N
turn
is the transformer turns ratio and L
m
is the magnetizing inductance.
The register
ceX_ps_current_emu
indicates which current is being sensed, and while primary-side current is
chosen, this register needs to be set to 1. In case both primary- and secondary-side current sensing is required
in a single-loop topology, PMBus command FW_CONFIG_REGULATION can be used by setting bit [1]
EN_PRIM_ISENSE to
“1”
in order to enable both the ISEN and BISEN current sense paths simultaneously. It
should be noted that the registers
ce0_ps_current_emu
and
ce1_ps_current_emu
also need to be configured
to indicate which input pin pair (ISEN/IREF or BISEN/BIREF) is used for primary and which is used for secondary
current sensing.
Boost and buck-boost topology current sense
For applications other than buck-derived, the correct topology for the CE should be selected according to
. The
ceX_topology
should be set to boost or buck-boost. In case of boost topology, the inductor
current can be measured only during the on-state. Therefore, the tracking must be disabled during the off- and
HIZ states. This can be set by selecting:
•
ceX_ktrack_off
= 0
•
ceX_ktrack_hiz
= 0
3.2.2.3
Error tracking
The error tracking block is essentially a gain block with independent gains for the on-, off- and HIZ states. As
shown in
•
Tracking ADC feedback is provided from the AFE quantizer output through the error tracking function
•
Error tracking output is summed with the slope estimator output and fed back to the AFE DAC
The tracking gain defines the relative strength of the IADC-based correction term, which is applied to the
emulated current waveform. The current sense tracking gains can be defined through registers:
I
SECONDARY
I
PRIMARY





















































