




























Tsino-Dynatron Electrical Technology (Beijing) Co., Ltd.
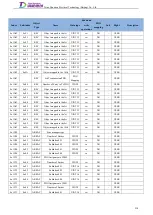
Number Index
Name
Unit
Parameter Range
Default value
Effective
time
Reference
chapters
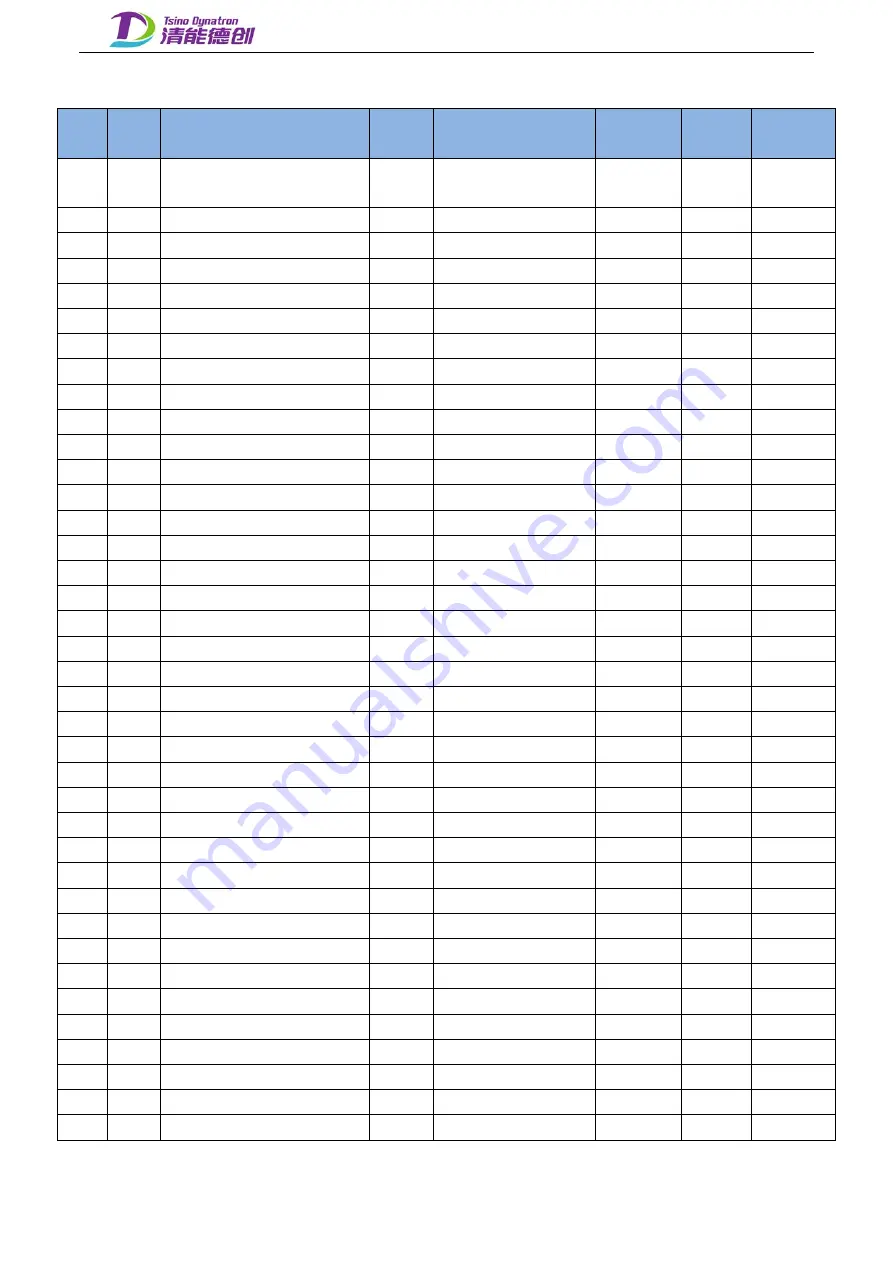
96
0x20D2 Rotor Positioning Error Detection
Sensitivity
-
1~10
2
Restart
7.11.5
97
0x2100 Set Speed of Square Wave
r/min
1~10000
100
Immediately
7.9.3
98
0x2101 Program Pulse Wait Time
ms
0~65535
1000
Immediately
7.9.3
99
0x2102 Square Wave Speed up Time
ms
0~65535
1000
Immediately
7.9.3
100
0x2103 Square Wave Speed Down Time
ms
0~65535
1000
Immediately
7.9.3
101
0x2104 Program Pulse Duration Time
ms
0~65535
1000
Immediately
7.9.3
102
0x2105 Program Pulse Loop Count
-
0~65535
1
Immediately
7.9.3
103
0x2106 Sine Wave Peak Speed
r/min
1~10000
100
Immediately
7.9.4
104
0x2107 Program Sin Offset Speed
r/min
-5000~5000
0
Immediately
7.9.4
105
0x2108 Program Sin Frequency
0.1Hz
1~30000
1
Immediately
7.9.4
106
0x2109 Sine Wave Peak Torque
‰TN
0~3000
100
Immediately
7.10.4
107
0x210A Sine Wave Offset Torque
‰TN
-3000~3000
0
Immediately
7.10.4
108
0x6007 Abort·connection·option·code
-
0x0000~0x0003
0
Immediately
7.7.5
109
0x605A Emergency stop option code
-
0x0000~0x0003
0x0002
Immediately
7.7.3
110
0x605B Shutdown option code
-
0x0000~0x0001
0x0000
Immediately
7.7.3
111
0x605C Disable operation option code
-
0x0000~0x0001
0x0000
Immediately
7.7.3
112
0x6060 Control mode setting
-
0x00000000~0x000F000F
0x00080008
Immediately
7.6
113
0x6065 Position following error threshold
Inc
1~2147483647
65535
Immediately
7.8.8
114
0x6066 Position following error time out
ms
1~10000
5
Immediately
7.8.8
115
0x6067 Position window
inc
1~2147483647
256
Immediately
7.8.7
116
0x6068 Position window time
ms
0~10000
1
Immediately
7.8.7
117
0x606D Velocity window
inc/s
1~2147483647
873810
Immediately
7.9.10
118
0x606E The velocity window time
ms
1~10000
10
Immediately
7.9.10
119
0x606F Zero velocity threshold
inc/s
1~65535
8738
Immediately
7.9.12
120
0x6070 Zero velocity threshold time
ms
1~10000
10
Immediately
7.9.12
121
0x6072 Max motor torque
‰TN
1~10000
3000
Immediately
7.3
122
0x6073 Max motor current
‰IN
1~10000
3000
Restart
7.3
123
0x6075 Motor rated current
mA
1~2147483647
4000
Restart
7.3
124
0x6076 Motor rated torque
mNm
1~2147483647
3000
Restart
7.3
125
0x607C Home offset
inc
-2147483648~2147483647
0
Restart
7.8.3
126
0x607E Polarity
-
0x0000~0x00E0
0x0000
Restart
7.7.2
127
0x607F Maximum profile velocity
Inc/s
1~2147483647
52428800
Immediately
7.7.7
128
0x6080 Maximum motor speed
r/min
1~20000
6000
Restart
7.3
129
0x6085 Emergency stop deceleration
inc/ms²
1~65535
120
Immediately
7.7.3
130
0x6086 Position profile type
-
0x0000~0x00FF
0x00FF
Immediately
7.8.2
131
0x6087 Torque slope
‰TN/s
1~4294967295
5000
Immediately
7.10.3
132
0x6098 Homing method
-
0x0000~0x003F
0x0023
Immediately
7.8.3
133
0x609A Homing acceleration
inc/ms²
1~65535
20
Immediately
7.8.3
233
Содержание EtherCAT CoolDrive RC Series
Страница 1: ...Updated on Update summary Updated version Version number D3 ...
Страница 17: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC3 2 3 2 7 ...
Страница 18: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC4 2 3 3 8 ...
Страница 19: ...Tsino Dynatron Electrical Technology Beijing Co Ltd 9 ...
Страница 20: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC6 2 3 4 1 ...







































































