





























Tsino-Dynatron Electrical Technology (Beijing) Co., Ltd.
0x01-Enable zero velocity lock shaft control.
Byte1: Velocity compensation control switch
0x00-Disable velocity compensation control;
0x01-Enable velocity compensation control switch.
Byte2: Detection switch of velocity following error
0x00-Disable detection of velocity following error;
0x01-Enable detection of velocity following error.
Byte3: Enabling switch of position control overflow detection in velocity mode
0x00-Disable position control overflow detection;
0x01-Enable position control overflow detection.
Parameter description:
Enable or disable zero velocity lock shaft, velocity compensation, velocity following
error detection, and position control overflow detection under the velocity mode.
User permission:
User/Engineer.
Parameter permission:
Read and Write
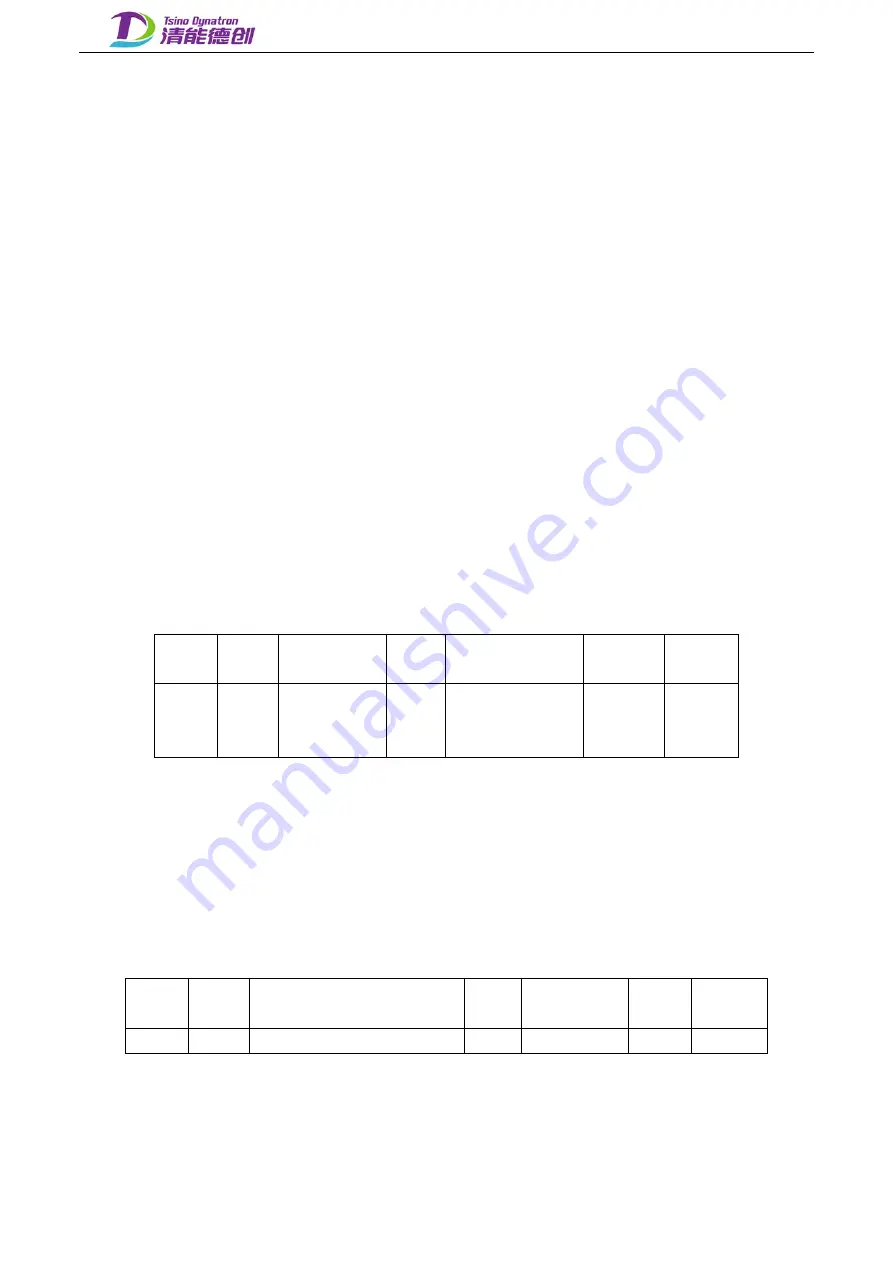
Number
Index
Name
Unit
Setting range
Default
value
Effective
time
83
0x20A3
Velocity
following
window
inc/s
1~2147483647
1048576 Immediately
Parameter description:
The velocity following error detection function is enabled/disabled through
parameter 0x2011.Byte2. If the velocity following error detection is enabled, when the velocity error exceeds the
set value of 0x20A3, and the lasting time exceeds the set value of 0x20A4, the drive will report a fault of big
velocity following error.
User permission:
User/Engineer.
Parameter permission:
Read and Write
Number
Index
Name
Unit
Setting range
Default
value
Effective
time
84
0x20A4
Velocity following window time
ms
10~10000
200
Immediately
165
Содержание EtherCAT CoolDrive RC Series
Страница 1: ...Updated on Update summary Updated version Version number D3 ...
Страница 17: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC3 2 3 2 7 ...
Страница 18: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC4 2 3 3 8 ...
Страница 19: ...Tsino Dynatron Electrical Technology Beijing Co Ltd 9 ...
Страница 20: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC6 2 3 4 1 ...







































































