



























Tsino-Dynatron Electrical Technology (Beijing) Co., Ltd.
Number
Index
Name
Unit
Setting range
Default
value
Effective
time
152
0x2067
Motor brake release
delay time
ms
0~1000
50
Immediately
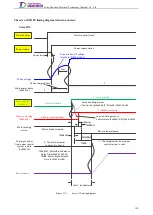
Parameter description:
Set the time from the drive receiving a servo ON command to the motor brake
release OK (allowed to receive the host computer commands).
User permission:
User/Engineer.
Parameter permission:
Read and Write
Number
Index
Name
Unit
Setting range
Default
value
Effective
time
164
0x2232
Motor brake
release time
ms
60~2000
400
Immediately
Parameter description:
Set the motor brake release time.
User permission:
User/Engineer.
Parameter permission:
Read and Write
Number
Index
Name
Unit
Setting range
Default
value
Effective
time
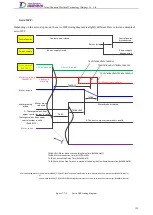
165
0x2233
Motor brake
action time
ms
60~2000
60
Immediately
Parameter description:
Set the motor brake action time.
User permission:
User/Engineer.
Parameter permission:
Read and Write
Number
Index
Name
Unit
Setting range
Default
value
Effective
time
166
0x2234
Motor brake
holding torque
‰
1~3000
1000
Restart
Parameter description: Set the motor braker holding torque, which is a permillage of the rated torque. When
the torque exceeds the set value of 0x2234, report fault: Abnormity in motor brake. (Test phase)
User permission:
User/Engineer.
Parameter permission:
Read and Write
121
Содержание EtherCAT CoolDrive RC Series
Страница 1: ...Updated on Update summary Updated version Version number D3 ...
Страница 17: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC3 2 3 2 7 ...
Страница 18: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC4 2 3 3 8 ...
Страница 19: ...Tsino Dynatron Electrical Technology Beijing Co Ltd 9 ...
Страница 20: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC6 2 3 4 1 ...







































































