





























Tsino-Dynatron Electrical Technology (Beijing) Co., Ltd.
Parameter description:
Set the power on position error threshold. When it is set to 0, the power on position
error detection will be disabled.
User permission:
User/Engineer.
Parameter permission:
Read and Write
Servo ON Vibration Suppression
7.8.12
Number
Index
Name
Unit
Setting range
Default
value
Effective
time
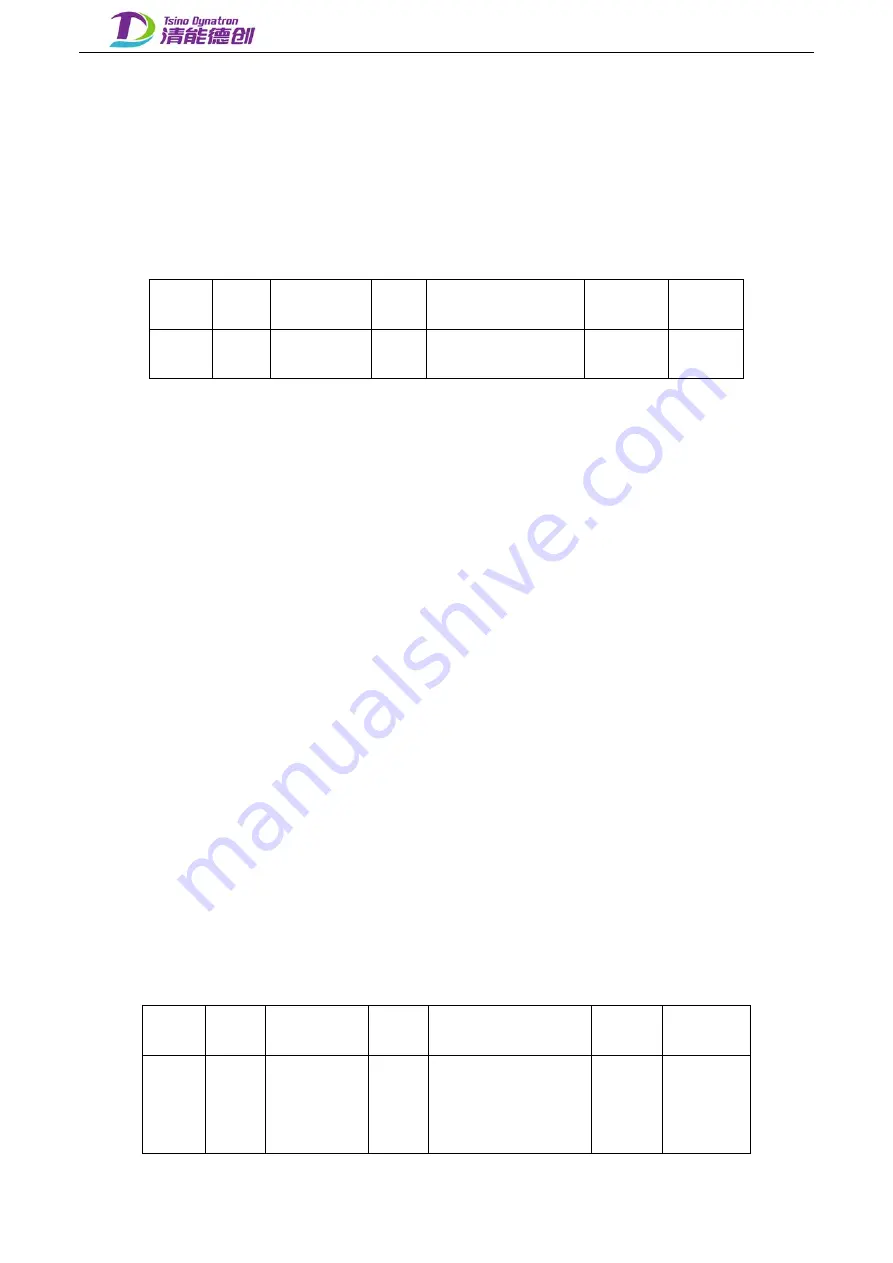
20
0x2022
Torque Control
Switch
—
0x00000000~0x0101010
0
0x00010000 Immediately
Byte0: CST torque limit selection
0x00 - Pulsating torque compensation control switch
0x01 - Enable pulsating torque compensation control
Byte1: Torque compensation control switch
0x00 - Torque compensation control is disabled;
0x01 - Torque compensation control is enabled.
Byte2: Static balance torque control switch
0x00 - Disable the static balance torque control;
0x01 - Enable the static balance torque control.
Byte3: Friction compensation control switch
0x00 - Disable the friction compensation control;
0x01 - Enable the friction compensation control.
Parameter description:
When the servo is ON, due to external forces like gravity, mechanical equipment
may have the nodding phenomenon. To prevent equipment damage due to nodding, it is necessary to set Byte2 of
0x2022 to 0x01 to start the static balance torque compensation 0x2207.
User permission:
User/Engineer.
Parameter permission:
Read and Write
Number
Index
Name
Unit
Setting range
Default
value
Effective
time
154
0x2207
Static Balance
Torque
Compensation
Value
mNm
-2147483648~2147483647
0
Immediately
150
Содержание EtherCAT CoolDrive RC Series
Страница 1: ...Updated on Update summary Updated version Version number D3 ...
Страница 17: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC3 2 3 2 7 ...
Страница 18: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC4 2 3 3 8 ...
Страница 19: ...Tsino Dynatron Electrical Technology Beijing Co Ltd 9 ...
Страница 20: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC6 2 3 4 1 ...







































































