




















Tsino-Dynatron Electrical Technology (Beijing) Co., Ltd.
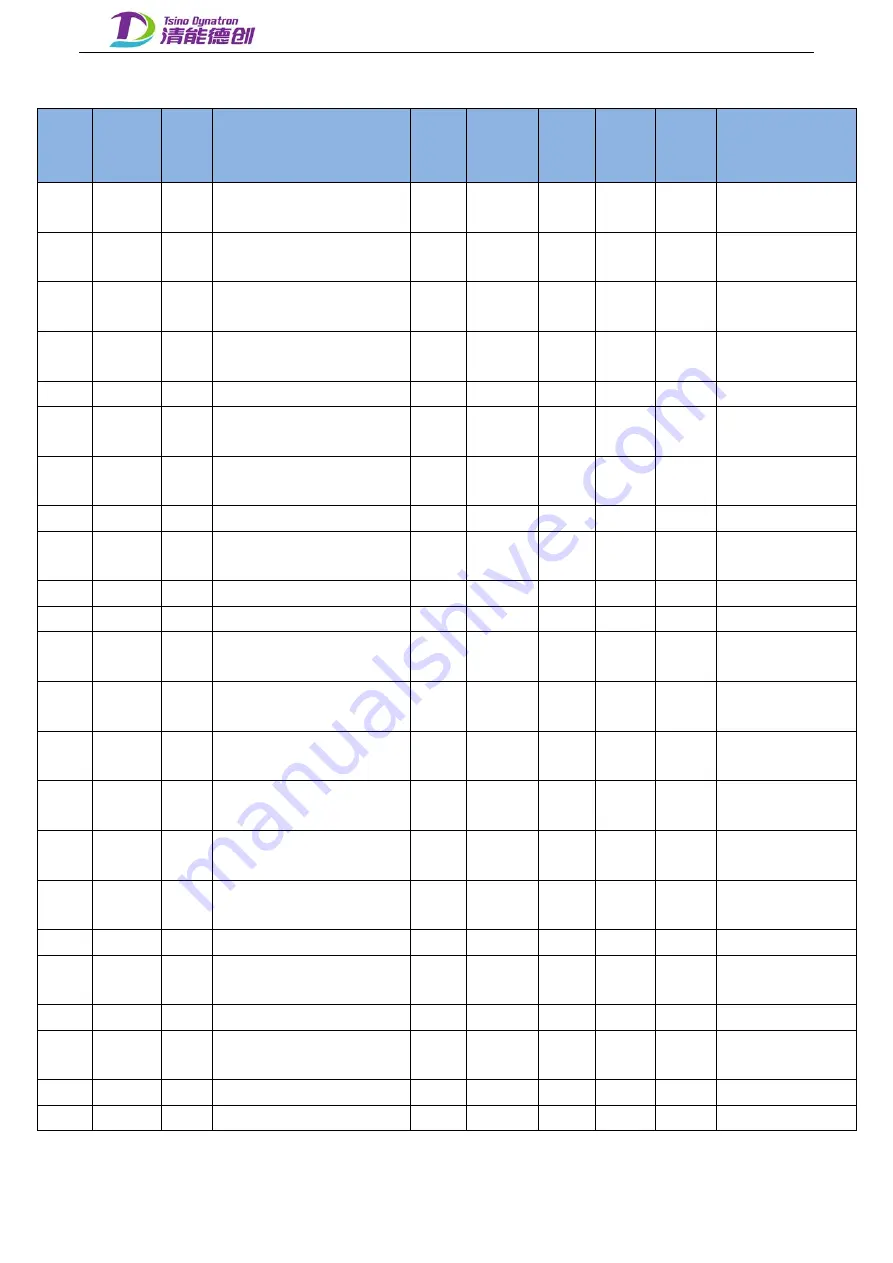
Index Sub-index
Object
Type
Name
Data
type
Read and
write
operations
PDO
mappin
g
Unit
Right
Description
0x2102
0x00
VAR
Program Pulse UpTime
UINT16
rw
NO
ms
USER
Square Wave Speed up
Time
0x2103
0x00
VAR
Program Pulse DownTime
UINT16
rw
NO
ms
USER
Square Wave Speed
Down Time
0x2104
0x00
VAR
Program Pulse Duration Time
UINT16
rw
NO
ms
USER
Square Wave Speed
Duration Time
0x2105
0x00
VAR
Program Pulse Repeat Count
UINT16
rw
NO
-
USER
Program Pulse Loop
Count
0x2106
0x00
VAR
Program Sin Peak Speed
UINT16
rw
NO
r/min
USER Sine Wave Peak Speed
0x2107
0x00
VAR
Program Sin Offset Speed
INT16
rw
NO
r/min
USER
Program Sin Offset
Speed
0x2108
0x00
VAR
Program Sin frequency
UINT16
rw
NO
Hz
USER
Sine Wave Speed
Frequency
0x2109
0x00
VAR
Program Sin Peak Torque
UINT16
rw
NO
‰
USER Sine Wave Peak Torque
0x210A
0x00
VAR
Program Sin Offset Torque
INT16
rw
NO
‰
USER
Sine Wave Offset
Torque
0x210B
0x00
VAR
Jog Slow Speed
UINT16
rw
NO
r/min
USER Manual Jog Slow Speed
0x210C
0x00
VAR
Jog Fast Speed
UINT16
rw
NO
r/min
USER Manual Jog Fast Speed
0x210D
0x00
VAR
Jog Acceleration Time
UINT32
rw
NO
ms
USER
Manual Jog
Acceleration Time
0x210E
0x00
VAR
Manual Step Target Position
INT32
rw
NO
inc
USER
Manual Step Target
Position
0x210F
0x00
VAR
Manual Step Profile Velocity
UINT32
rw
NO
inc/s
USER
Manual Step Profile
Velocity
0x2110
0x00
VAR
Manual Step End Velocity
UINT32
rw
NO
inc/s
USER
Manual Step End
Velocity
0x2111
0x00
VAR Manual Step Profile Acceleration UINT32
rw
NO
inc/ms²
USER
Manual Step Profile
Acceleration
0x2112
0x00
VAR Manual Step Profile Deceleration UINT32
rw
NO
inc/ms²
USER
Manual Step Profile
Deceleration
0x2113
0x00
VAR
Program Pulse Torque
UINT16
rw
NO
‰
USER
Square Wave Torque
0x2200
0x00
VAR
Internal Reference Velocity
INT32
ro
TXPDO
pu
USER
Internal Reference
Velocity
0x2201
0x00
VAR
Internal Demand Velocity
INT32
ro
TXPDO
pu
USER Velocity demand value
0x2203
0x00
VAR
Velocity Control Effort
INT32
ro
TXPDO
pu
USER
Velocity Control
Output
0x2204
0x00
VAR
Position Control Effort
INT32
ro
TXPDO
pu
USER Position Control Output
0x2206
0x00
VAR
Motor Actual Speed
INT16
ro
TXPDO
r/min
USER
Motor Actual Speed
253
Содержание EtherCAT CoolDrive RC Series
Страница 1: ...Updated on Update summary Updated version Version number D3 ...
Страница 17: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC3 2 3 2 7 ...
Страница 18: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC4 2 3 3 8 ...
Страница 19: ...Tsino Dynatron Electrical Technology Beijing Co Ltd 9 ...
Страница 20: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC6 2 3 4 1 ...







































































