




























Tsino-Dynatron Electrical Technology (Beijing) Co., Ltd.
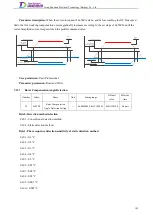
Figure 8.2-2.
Diagram of velocity PI gain automatic switching
Roles of the velocity regulator adaptive control function:
1. It can be adapted to a higher gain to obtain a better command-following performance during the motor
running;
2. It can be adapted to a lower gain to suppress vibration when the motor stops and the servo is locked;
3. It can be adapted to a higher gain to shorten position setting time when the motor stops;
4. It can be adapted to a higher or lower gain according to different loads.
Number
Index
Name
Unit
Setting range
Default
value
Effective
time
82
0x2095
Acceleration
Feedforward
Control Switch
—
0x00000000~
0x00000101
0x00000001 Immediately
Byte0: Enable bit of acceleration feedforward torque compensation
0x00 - Disable the acceleration feedforward torque compensation control
0x01 - Enable the acceleration feedforward torque compensation control
Bytr0: Acceleration feedforward gain selection
0x00 - Manual setting
0x01 - Automatic setting
Byte2~3: Reserved
User permission:
User/Engineer.
Parameter permission:
Read and Write
191
Содержание EtherCAT CoolDrive RC Series
Страница 1: ...Updated on Update summary Updated version Version number D3 ...
Страница 17: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC3 2 3 2 7 ...
Страница 18: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC4 2 3 3 8 ...
Страница 19: ...Tsino Dynatron Electrical Technology Beijing Co Ltd 9 ...
Страница 20: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC6 2 3 4 1 ...







































































