





























Tsino-Dynatron Electrical Technology (Beijing) Co., Ltd.
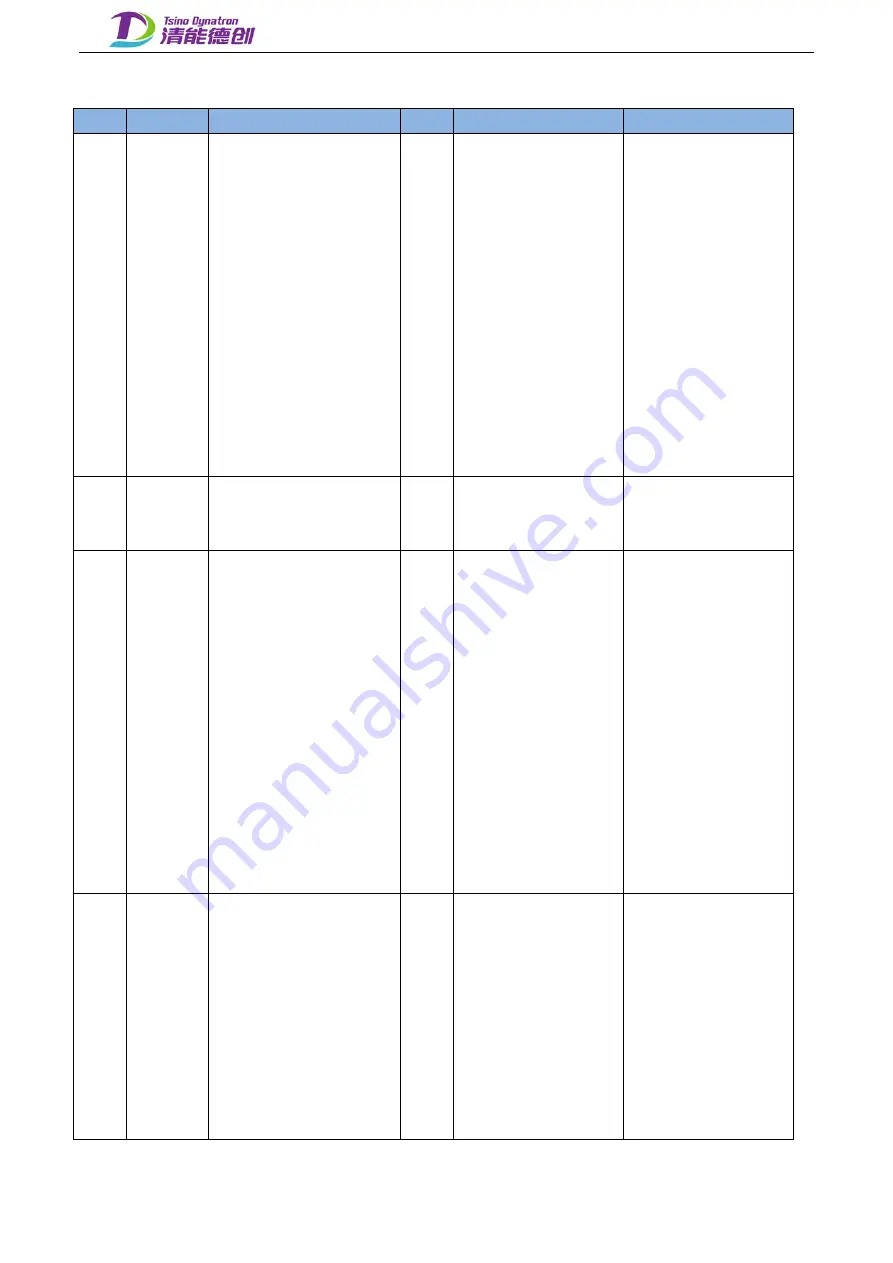
Index Fault code
Description
Type
Causes of faults
Handling Suggestions
5. Abnormal internal circuit
of the drive
EtherCAT communication
cycle
4. Appropriately increase
the set value of motor
parameter 0x20D3
5. Modify the host
computer EtherCAT master
bottom DC synchronization
mechanism, and make sure
the host computer issues
RxPDO data at least 100us
earlier than DC
synchronization signal
6. Replace the drive
11
0x8612
Position hard overrun
2
The limit switch input is
triggered
Check the limit switch state
and make sure the limit
switch is not triggered
12
0xFF16
Positive soft limit
2
The actual position value
exceeds the range of servo
parameters 0x2004 and
0x2005
1. Appropriately increase
the set values of servo
parameters 0x2004 and
0x2005
2. Operate the motor within
the range specified by servo
parameters 0x2004 and
0x2005
3. If you don't want to use
this function, disable soft
limit detection function
through servo parameter
0x2000
13
0xFF17
Negative soft limit
2
The actual position value
exceeds the range of servo
parameters 0x2004 and
0x2005
1. Appropriately increase
the set values of servo
parameters 0x2004 and
0x2005
2. Operate the motor within
the range specified by servo
parameters 0x2004 and
0x2005
3. If you don't want to use
this function, disable soft
222
Содержание EtherCAT CoolDrive RC Series
Страница 1: ...Updated on Update summary Updated version Version number D3 ...
Страница 17: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC3 2 3 2 7 ...
Страница 18: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC4 2 3 3 8 ...
Страница 19: ...Tsino Dynatron Electrical Technology Beijing Co Ltd 9 ...
Страница 20: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC6 2 3 4 1 ...







































































