




























Tsino-Dynatron Electrical Technology (Beijing) Co., Ltd.
1.
When Byte1 is set to 0x00, the interface encoder single-turn resolution is consistent with the actual resolution
and Byte0 is invalid.
2.
When Byte1 is set to 0x01, the interface encoder single-turn resolution can be modified by setting Byte0, and
can not be higher than the actual resolution. If the set resolution of interface encoder single-turn is higher than the
actual resolution, it will be set to the same value as the actual resolution automatically.
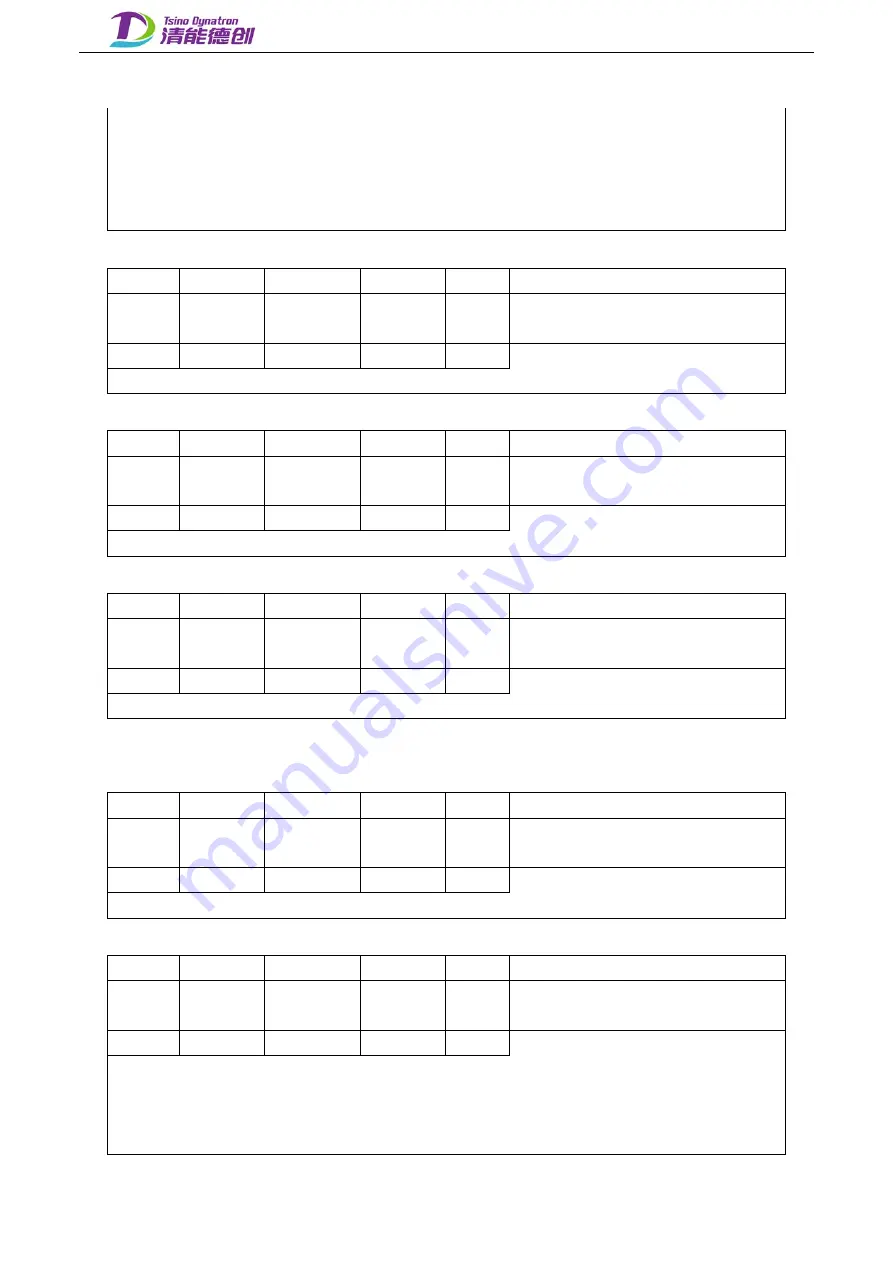
0x2074 Incremental encoder resolution
Index
0x2074
Object type
VAR
Name
Incremental encoder resolution
Sub-index
PDO
mapping
Read and write
operations
Data type
Unit
Description
0x00
NO
rw
UINT32
inc/rev
Incremental encoder resolution
Set the incremental encoder resolution.
0x2076 Absolute Encoder Single-turn Resolution
Index
0x2076
Object type
VAR
Name
Absolute Encoder Single-turn Resolution
Sub-index
PDO
mapping
Read and write
operations
Data type
Unit
Description
0x00
NO
rw
UINT16
inc/rev
Absolute Encoder Single-turn Resolution
Set the absolute encoder single-turn resolution based on the actual motor encoder single-turn value in real application.
0x2077 Absolute Encoder Multi-turn Resolution
Index
0x2077
Object type
VAR
Name
Absolute Encoder Multi-turn Resolution
Sub-index
PDO
mapping
Read and write
operations
Data type
Unit
Description
0x00
NO
rw
UINT16
inc/rev
Absolute encoder multi turn bits
Set the absolute encoder multi-turn resolution based on the actual motor encoder multi-turn value in real application.
Motor Brake Parameters
6.4.4
0x203A Motor Brake Active Holding Delay Time
Index
0x203A
Object type
VAR
Name
Motor Brake Active Holding Delay Time
Sub-index
PDO
mapping
Read and write
operations
Data type
Unit
Description
0x00
NO
rw
UINT16
ms
Motor Brake Active Holding Delay Time
Set the delay time from the drive receiving a servo OFF command to actually blocking the motor output.
0x203C Motor Brake Control
Index
0x203C
Object type
VAR
Name
Motor Brake Control
Sub-index
PDO
mapping
Read and write
operations
Data type
Unit
Description
0x00
NO
rw
UINT32
-
Motor Brake Control
Parameter function:
Byte0: Motor brake detection switch
0x00-Disable motor brake detection function;
0x01-Enable motor brake detection function.
74
Содержание EtherCAT CoolDrive RC Series
Страница 1: ...Updated on Update summary Updated version Version number D3 ...
Страница 17: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC3 2 3 2 7 ...
Страница 18: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC4 2 3 3 8 ...
Страница 19: ...Tsino Dynatron Electrical Technology Beijing Co Ltd 9 ...
Страница 20: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC6 2 3 4 1 ...







































































