




























Tsino-Dynatron Electrical Technology (Beijing) Co., Ltd.
interference source
separately
6. Add an inlet filter for
the input power supply of
the drive
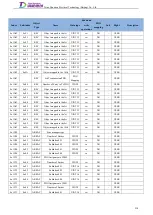
16
0xFF40
Soft limit alarm
The actual position value
or the target position
value exceeds the range of
servo parameters 0x2004
and 0x2005
1. Appropriately increase
the set values of servo
parameters 0x2004 and
0x2005
2. Operate the motor
within the range of servo
parameters 0x2004 and
0x2005
3. Reduce the target
position value, and make
sure it is within the range
of servo parameters
0x2004 and 0x2005
4. If you don't want to use
this function, disable soft
limit detection function
through servo parameter
0x2000
17
0xFF41
Invalid AD correction
coefficients alarm
The drive has not
performed AD correction
Reset AD correction
coefficients for the drive
18
0xFF42
Abnormal position profile
parameters alarm
The position profile
parameters are improperly
set
Set the parameters of the
position profile properly
19
0xFF43
Excessive power on position
error alarm
After the drive is powered
off, the motor position is
shifted
1. The drive executes
fault reset command
2. Re-power on the drive
or soft reset
229
Содержание EtherCAT CoolDrive RC Series
Страница 1: ...Updated on Update summary Updated version Version number D3 ...
Страница 17: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC3 2 3 2 7 ...
Страница 18: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC4 2 3 3 8 ...
Страница 19: ...Tsino Dynatron Electrical Technology Beijing Co Ltd 9 ...
Страница 20: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC6 2 3 4 1 ...







































































