




























Tsino-Dynatron Electrical Technology (Beijing) Co., Ltd.
Byte3: Reserved. The default value is 0
Parameter description:
Set the running modes of servo drives. The host controller can read the current
running mode of the servo drive through PDO object 0x6061.
User permission:
User/Engineer.
Parameter permission:
Read and Write
Basic Running Function Setting
7.7
Servo ON/OFF
7.7.1
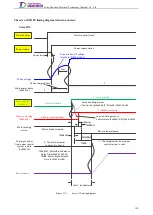
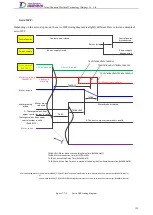
The servo can be enabled through DriveStarter simply by clicking servo ON or OFF button on the DriveStarter
interface. The EtherCAT master can enable/disable the servo through settings below: Servo ON changes the current
status of bit3, bit2, bit1 and bit0 in the control word (refer to PDO object 0x6040), and sets them to 1; servo OFF
changes the status of bit3 in 0x6040, sets it to 0, and sets bit2, bit1 and bit0 to 1.
123
Содержание EtherCAT CoolDrive RC Series
Страница 1: ...Updated on Update summary Updated version Version number D3 ...
Страница 17: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC3 2 3 2 7 ...
Страница 18: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC4 2 3 3 8 ...
Страница 19: ...Tsino Dynatron Electrical Technology Beijing Co Ltd 9 ...
Страница 20: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC6 2 3 4 1 ...






































































