




























Tsino-Dynatron Electrical Technology (Beijing) Co., Ltd.
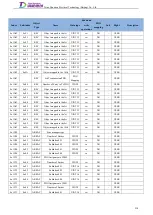
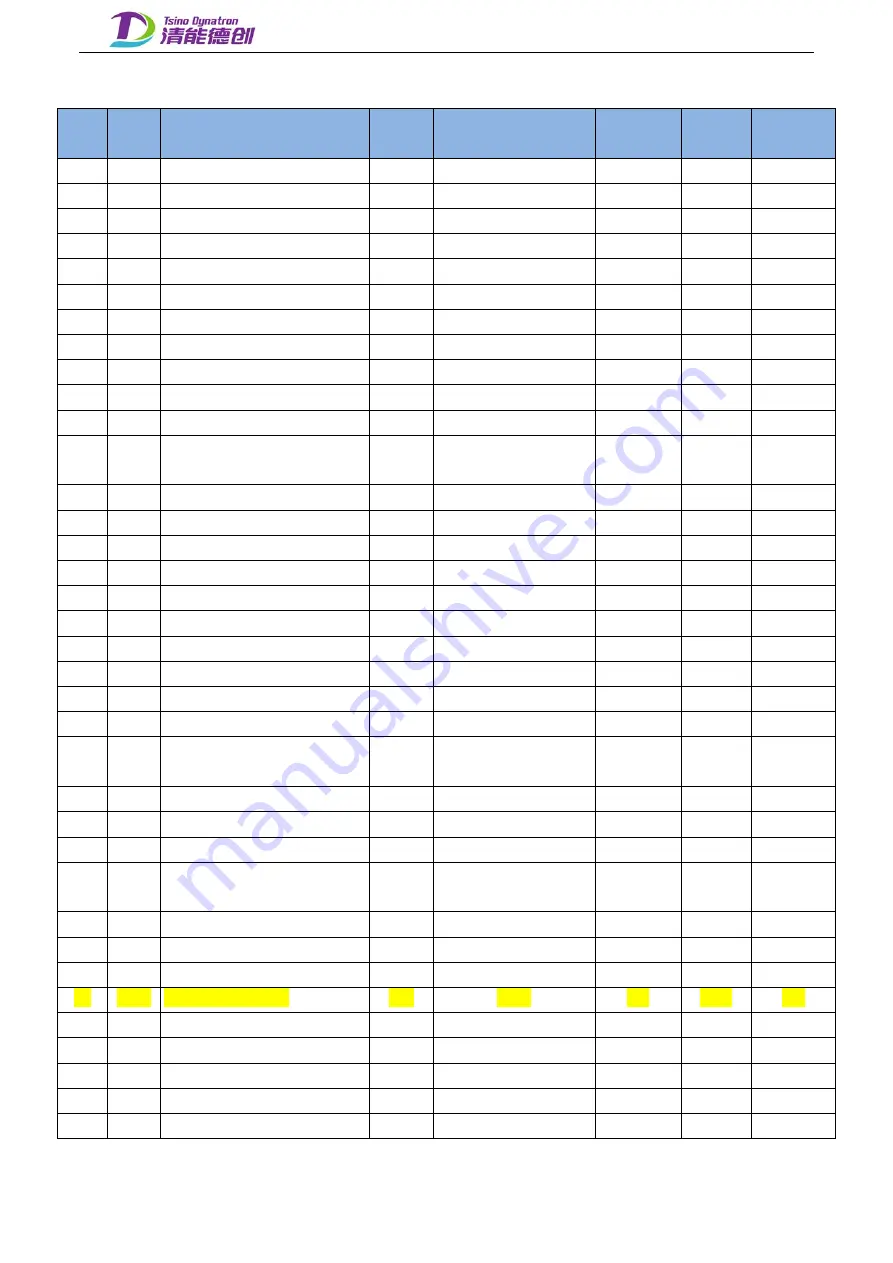
Number Index
Name
Unit
Parameter Range
Default value
Effective
time
Reference
chapters
134
0x60C5 Max acceleration
inc/ms²
1~2147483647
500
Immediately
7.9.2
135
0x60C6 Max deceleration
inc/ms²
1~2147483647
2147483647
Immediately
7.9.2
136
0x6402 Motor type
-
0x0000~0x000F
0x0003
Restart
7.3
137
0x210B Manual Jog Slow Speed
r/min
-1000~1000
100
Immediately
7.9.5
138
0x210C Manual Jog Fast Speed
r/min
-6000~6000
500
Immediately
7.9.5
139
0x210D Manual Jog Acceleration Time
ms
0~10000
100
Immediately
7.9.5
140
0x210E Manual Step Target Position
inc
-2147483648~2147483647
1024
Immediately
7.8.4
141
0x210F Manual Step Profile Velocity
inc/s
0~2147483647
1747630
Immediately
7.8.4
142
0x2110 Manual Step End Velocity
inc/s
0~2147483647
0
Immediately
7.8.4
143
0x2111 Manual Step Profile Acceleration
inc/ms²
0~2147483647
100
Immediately
7.8.4
144
0x2112 Manual Step Profile Deceleration
inc/ms²
0~2147483647
100
Immediately
7.8.4
145
0x2085 Brake Chopper switched on Voltage of
the drive
mV
0~2147483647
100
Read only
7.5.1
146
0x2086 Inverter Rated Current
mA
0~2147483647
100
Read only
7.11.1
147
0x6088 Torque profile mode
-
0x0000~0xFFFF
0x8003
Immediately
7.10.2
148
0x2113 Square Wave Torque
‰TN
-4000~4000
100
Immediately
7.10.3
149
0x202D Motor Fast Overload Alarm Level
%
100~500
200
Immediately
7.7.4
150
0x202E Motor Fast Overload Alarm Time
s
1~60
10
Immediately
7.7.4
151
0x2066 Lowpass Filter Type Select
-
0x00000000~0x03030103
0x01020102
Restart
7.9.7
152
0x2067 Motor brake release delay time
ms
0~1000
50
Immediately
7.5.2
153
0x20D3 EtherCAT Communication Setting
-
0x00000000~0x0001017F
0x00000006
Restart
7.7.5
154
0x2207 Static Balance Torque Compensation Value
mNm
-2147483648~2147483647
0
Immediately
7.8.12
155
0x2068 Positioning Vibration Suppressor Frequency
0.1Hz
10~1000
10
Immediately
7.8.9
156
0x2069 Positioning Vibration Suppressor
Bandwidth
0.1Hz
1~100
5
Immediately
7.8.9
157
0x206A Vibration suppression control switch
-
0x00000000~0x00000301
0x00000000
Restart
7.8.9
158
0x20C8 Motor torque constant
mNm/A
1~2147483647
2290
Restart
7.3
159
0x20C9 Motor thermal time constant
sec
60~3600
1100
Restart
7.3
160
0x20CA Flux weaking compensation inflection
velocity
‰
1000~3000
3000
Restart
7.11.6
161
0x20CB Flux weaking compensation coefficient
‰
0~1000
0
Restart
7.11.6
164
0x2232 Motor brake release time
ms
60~2000
400
Immediately
7.5.2
165
0x2233 Motor brake action time
ms
60~2000
60
Immediately
7.5.2
166
0x2234 Motor brake holding torque
mNm
1~3000
1000
Restart
7.5.2
168
0x202F Motor Operation Environment
-
0x00000000~0x07010101
0x00010000
Immediately
7.3
169
0x200E Power On Position Error Threshold
inc
0~2147483647
0
Restart
7.8.11
170
0x201A Alarm Operation Switch
-
0x00000000~0x00000001
0x00000001
Immediately
7.11.8
171
0x201B Reserved
-
10~10000
30
Immediately
-
172
0x201C Reserved
r/min
0~500
10
Immediately
-
234
Содержание EtherCAT CoolDrive RC Series
Страница 1: ...Updated on Update summary Updated version Version number D3 ...
Страница 17: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC3 2 3 2 7 ...
Страница 18: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC4 2 3 3 8 ...
Страница 19: ...Tsino Dynatron Electrical Technology Beijing Co Ltd 9 ...
Страница 20: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC6 2 3 4 1 ...







































































