



























Tsino-Dynatron Electrical Technology (Beijing) Co., Ltd.
Number
Index
Name
Unit
Setting range
Default
value
Effective
time
37
0x203A
Motor Brake Active
Holding Delay
Time
ms
0~ 10000
100
Immediately
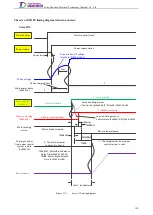
Parameter function:
Set the delay time from the drive receiving a servo OFF command to actually blocking
the motor output.
Parameter description:
It is used for the control of gravity loads to prevent the "nodding" phenomenon when
the servo is OFF.
User permission:
User/Engineer.
Parameter permission:
Read and Write
Number
Index
Name
Unit
Setting range
Default
value
Effective
time
41
0x203E
Motor Brake
Active Allowed
Delay Time
ms
0~10000
500
Immediately
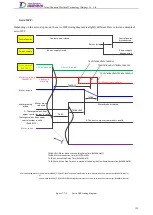
Parameter description:
It is effective only when 0x203C.Byte0=1, 0x203C.Byte2=1, and 0x203C.Byte3=0.
If the motor does not stop within the set time upon emergency stop or when the servo is OFF, the motor brake will
be forced active
User permission:
User/Engineer.
Parameter permission:
Read and Write
Number
Index
Name
Unit
Setting range
Default
value
Effective
time
42
0x203F
Motor Brake
Active Speed
Threshold Value
r/min
0~10000
100
Immediately
Parameter description:
When the actual motor speed is lower than this threshold, brakes will be applied
immediately. It is effective only when 0x203C.Byte0=0x01, and 0x203C.Byte3=0x00. Parameter 0x203F should
not be overlarge. It is recommended to use the factory default.
User permission:
User/Engineer.
Parameter permission:
Read and Write
120
Содержание EtherCAT CoolDrive RC Series
Страница 1: ...Updated on Update summary Updated version Version number D3 ...
Страница 17: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC3 2 3 2 7 ...
Страница 18: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC4 2 3 3 8 ...
Страница 19: ...Tsino Dynatron Electrical Technology Beijing Co Ltd 9 ...
Страница 20: ...Tsino Dynatron Electrical Technology Beijing Co Ltd Dimension Drawing of RC6 2 3 4 1 ...







































































