





























GD32F20x User Manual
347
Note:
"-" means "no counting"; "X" means impossible.
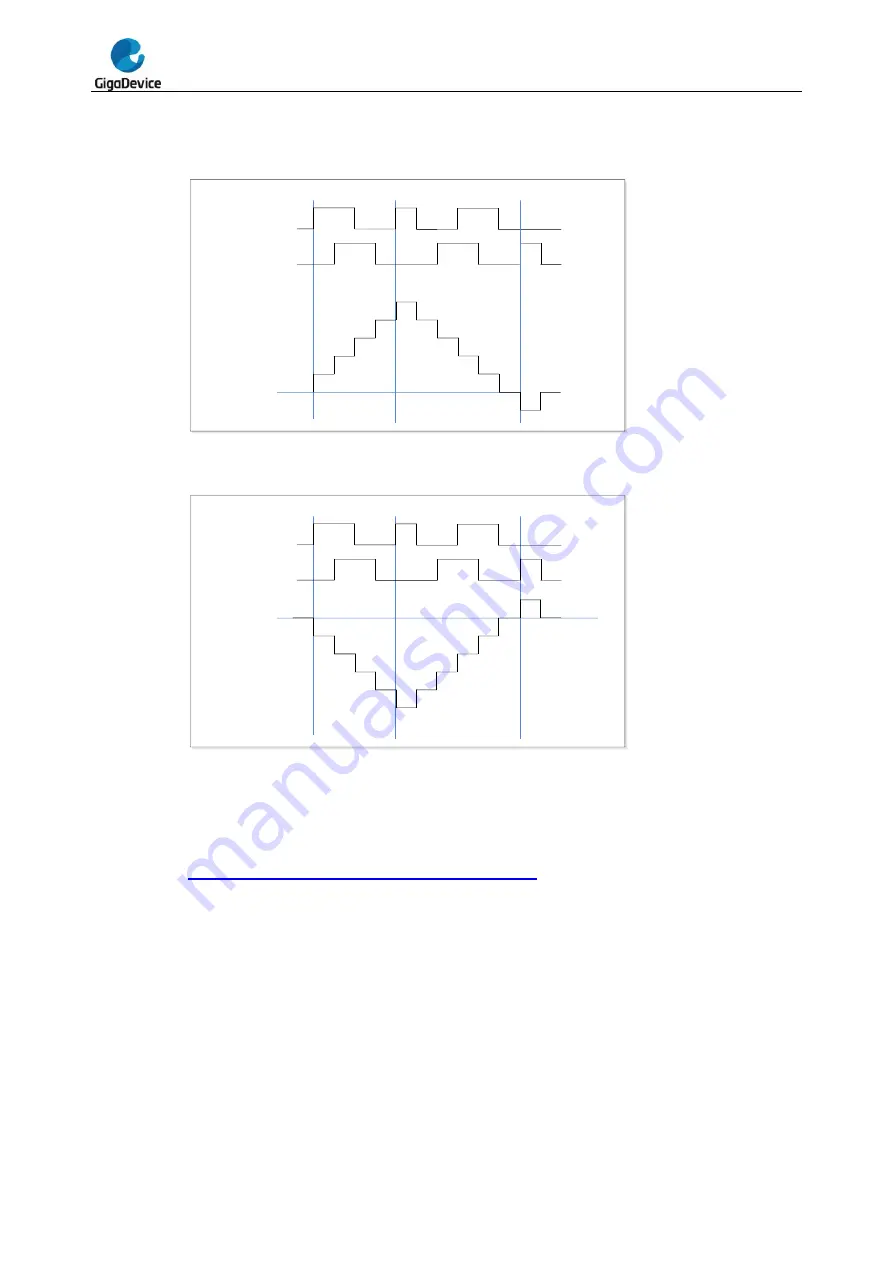
Figure 18-18. Example of counter operation in encoder interface mode
CI0
CI1
UP
down
Counter
Figure 18-19. Example of encoder interface mode with CI0FE0 polarity inverted
CI0
CI1
UP
down
Counter
Hall sensor function
Hall sensor is generally used to control BLDC Motor; advanced timer can support this function.
Figure 18-20. Hall sensor is used to BLDC motor
show how to connect. And we can see
we need two timers. First TIMER_in
(
Advanced/GeneralL0 TIMER
)
should accept three
Rotor Position signals from Motor.
Each of the 3 sensors provides a pulse that applied to an input capture pin, can then be
analyzed and both speed and position can be deduced.
By the internal connection such as TRGO-ITIx, TIMER_in and TIMER_out can be connected.
TIMER_out will generate PWM signal to control BLDC motor’s speed based on the ITRx.
Then, the connection between the TIMER_in and TIMER_out forms a feedback circuit that
can be configured according to requirements.
About the TIMER_in, it needs to have input XOR function, so you can choose from
Advanced/GeneralL0 TIMER.
Summary of Contents for GD32F20 Series
Page 191: ...GD32F20x User Manual 191 Bits Fields Descriptions 31 0 TRNDATA 31 0 32 Bit Random data ...
Page 290: ...GD32F20x User Manual 290 conversion is ongoing ...
Page 325: ...GD32F20x User Manual 325 15 0 ALRM 15 0 RTC alarm value low ...
Page 385: ...GD32F20x User Manual 385 ...
Page 523: ...GD32F20x User Manual 523 clears AERR bit by writing 0 to it ...







































































