





























17 - 67
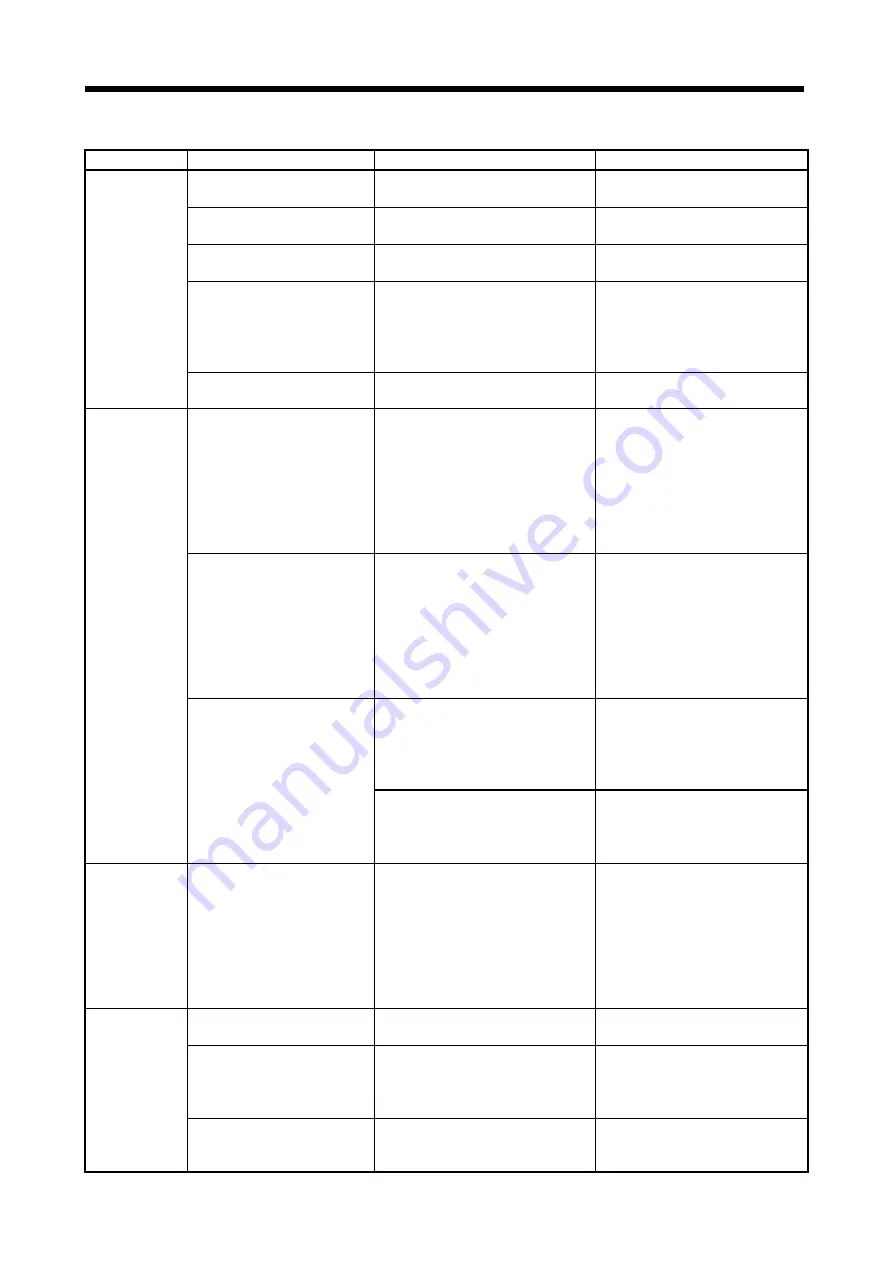
17. SPEED CONTROL OPERATION
Description
Check method
Possible cause
Action
The servo motor
vibrates.
Check the servo motor power
cable.
The output circuit is open phase.
Review the wiring of the servo motor
power cable.
Check if the vibration varies
depending on the speed.
An unbalanced torque of the machine
side is large.
Adjust the balance of the machine
side.
Check the mounting accuracy of
the servo motor and machine.
The eccentricity due to a core gap is
large.
Review the direct accuracy.
Check the load for the servo
motor axis.
The load for the servo motor axis is
large.
Adjust the load for the shaft within the
specifications of the servo motor.
For the shaft permissible load, refer to
"Servo Motor Instruction Manual (Vol.
2)".
Check the vibration from outside. An external vibration propagated to the
servo motor.
Prevent the vibration from the external
vibration source.
The rotation
accuracy is low.
(The rotation
speed is
unstable.)
1. If the servo motor can be driven
safely, repeat acceleration and
deceleration three times or
more to complete auto tuning.
2. Increase the auto tuning
response (parameter
No.PA09). (Except for manual
mode)
1. The servo gain is low.
2. The auto tuning response is low.
Increase the auto tuning response, and
readjust the gain. (Refer to chapter 9.)
Check if the limiting torque (TLC)
is in ON.
1. Check with the external I/O
signal display in the diagnostic
mode.
2. Check with "Input/output I/F
Display" command of "Monitor"
menu on MR Configurator.
An unintended torque limit is enabled.
(When the torque limit is enabled, the
torque limit (TLC) is ON. )
Cancel the torque limit.
Check if the maximum torque
exceeds the torque limit value.
1. Check the "instantaneous
torque" in the status display.
2. Check the torque ripple with
“Graph” command of "Monitor"
menu on MR Configurator .
The maximum torque is insufficient.
1. Shortage of servo capacity.
2. Too large load.
1. Reduce the load by changing the
mass and shape of the workpiece.
2. Reduce the effective load ratio by
increasing acceleration/deceleration
time.
The setting of the torque limit is
incorrect.
(Set with parameter PA11, PA12,
PC35.)
Check the torque limit setting.
Unsteady
vibration at a
stop.
1. If the servo motor can be driven
safely, repeat acceleration and
deceleration three or four times
to complete auto tuning.
2. Increase the auto tuning
response (parameter
No.PA09). (Other than manual
mode)
1. The servo gain is low.
2. The auto tuning response is low.
Increase the auto tuning response, and
readjust the gain. (Refer to chapter 9.)
The servo motor
starts rotating
upon the
power-on of the
servo amplifier,
or the servo
motor starts
rotating upon
servo-on.
Check if the servo-on is turned
ON.
Servo-on has been on at power-on.
Check the controller programs.
For a servo motor with an
electromagnetic brake, check the
timing of releasing the
electromagnetic brake.
1. The sequence of releasing the
electromagnetic brake is incorrect.
2. Failure of power supply for the
electromagnetic brake.
1. Check the sequence of releasing
the electromagnetic brake.
2. Check the power supply for the
electromagnetic brake.
Check the servo motor power
cable.
The output circuit is open phase.
Check the wiring of the servo motor
power cable.
Summary of Contents for Melservo-J3 Series MR-J3-B
Page 19: ...10 MEMO ...
Page 55: ...1 36 1 FUNCTIONS AND CONFIGURATION MEMO ...
Page 61: ...2 6 2 INSTALLATION MEMO ...
Page 179: ...4 58 4 SIGNALS AND WIRING MEMO ...
Page 241: ...5 62 5 OPERATION MEMO ...
Page 357: ...10 16 10 SPECIAL ADJUSTMENT FUNCTIONS MEMO ...
Page 385: ...11 28 11 TROUBLESHOOTING MEMO ...
Page 397: ...12 12 12 OUTLINE DRAWINGS MEMO ...
Page 755: ...17 70 17 SPEED CONTROL OPERATION MEMO ...
Page 793: ...App 38 APPENDIX MEMO ...
Page 799: ...MEMO ...







































































