





























Message
Object 1
Message
Object
Last
Receive OK
Transmit OK
Receive OK
Transmit OK
Message Object Interrupts
IE0
DCAN0INT
IE1
DCAN1INT
Message Object Interrupts
can be Routed to
DCAN0INT or DCAN1INT Line
IntPndMux(n)
IntPndMux(1)
To Status Interrupt
RxIE
TxIE
RxIE
TxIE
Global Power Down Mode
1446
SPNU563A – March 2018
Copyright © 2018, Texas Instruments Incorporated
Controller Area Network (DCAN) Module
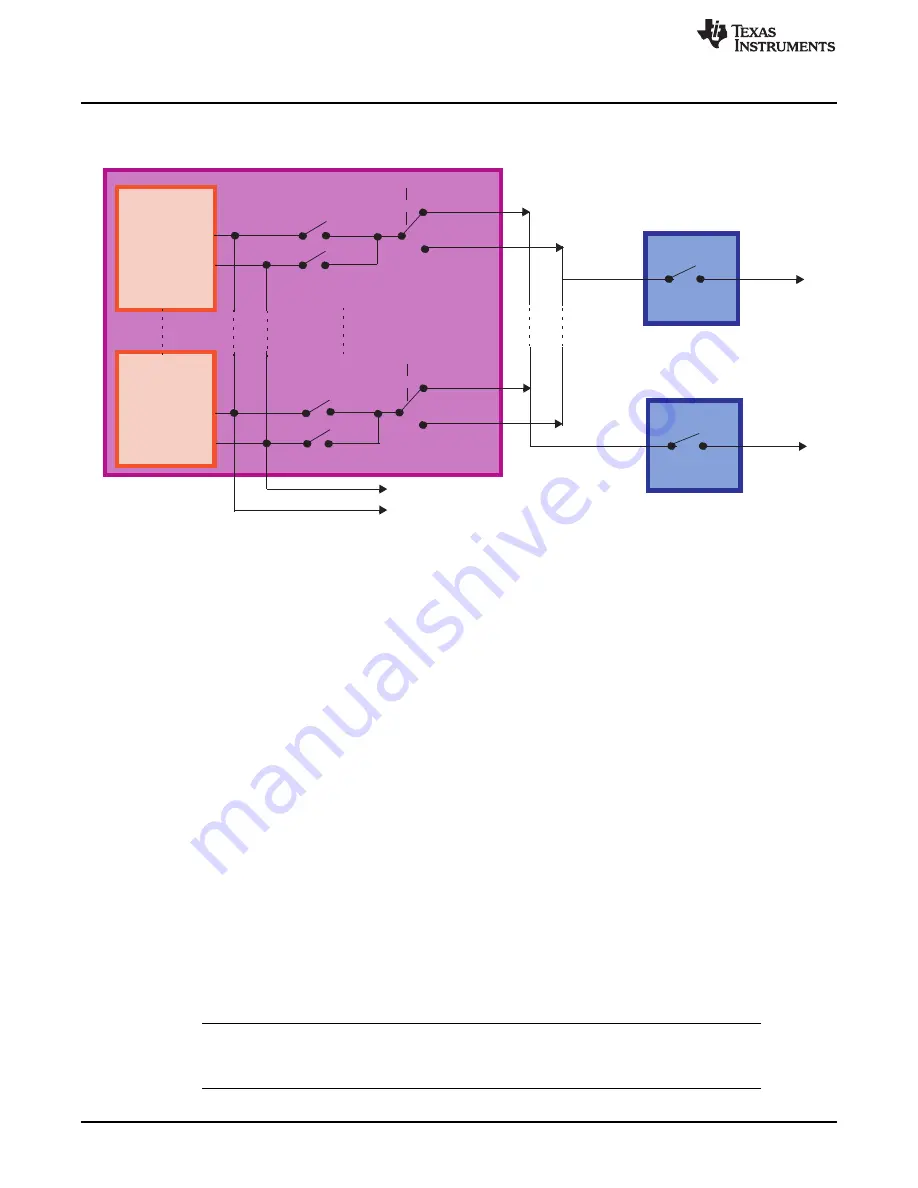
Figure 27-14. CAN Interrupt Topology 2
Details of Interrupt Mapping for actual device will be described in the device specific data sheet.
27.11 Global Power Down Mode
The device architecture supports a centralized global power down control over the peripheral modules
through the Peripheral Central Resource (PCR) module (Additional information can be found in Platform
Architecture Specification).
27.11.1 Entering Global Power Down Mode
The global power down mode for the DCAN is requested by setting the appropriate Peripheral Power
Down Set bit (
PSPWRDWNSETx
) in the PCR module.
The DCAN then finishes all transmit requests of the message objects. When all requests are done, the
DCAN waits until a bus idle state is recognized. Then it will automatically set the Initbit to indicate that the
global power down mode has been entered.
27.11.2 Wakeup From Global Power Down Mode
When the DCAN module is in global power down mode, a CAN bus activity detection circuit exists, which
can be active, if enabled. If this circuit is active,on occurrence of a dominant CAN bus level, the DCAN will
set the
WakeUpPnd
bit in Error and Status Register (DCAN ES).
If Status Interrupts are enabled, also an interrupt will be generated. This interrupt could be used by the
application to wakeup the DCAN. For this, the application needs to set the appropriate Peripheral Power
Down Clear bit (
PSPWRDWNCLRx
) in the PCR module, and to clear the Init bit in CAN Control Register.
After the Init bit has been cleared, the DCAN module waits until it detects 11 consecutive recessive bits on
the CAN_RX pin and then goes Bus-Active again.
NOTE:
The CAN transceiver circuit has to stay active during CAN bus activity detection. The first
CAN message, which initiates the bus activity, cannot be received. This means that the first
message received in power down mode is lost.







































































