





























14 - 13
MELSEC-Q
14 DEDICATED INSTRUCTIONS
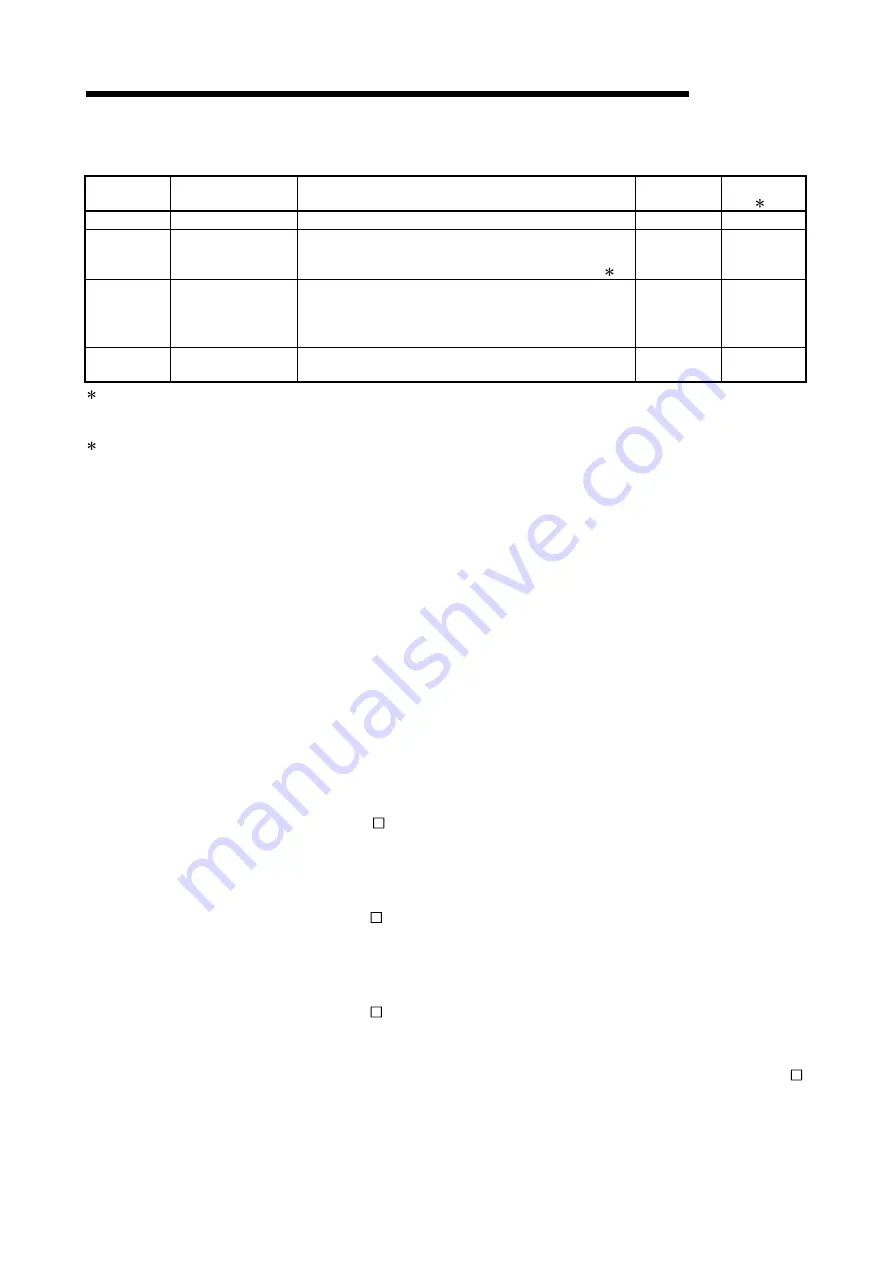
[Control data]
Device
Item
Setting data
Setting range
Setting side
( 1)
(S)+0 System
area
–
–
–
(S)+1 Complete
status
The state at the time of completion is stored.
0
: Normal completion
Other than 0 : Abnormal completion (error code)( 2)
– System
(S)+2
Teaching data
selection
The address (positioning address/arc address) to which
the current feed value is written is set.
0: Current feed value is written to positioning address.
1: Current feed value is written to arc address.
0, 1
User
(S)+3
Positioning data No.
The positioning data No. for which teaching is carried out
is set.
1 to 600
User
1: The data on the setting side is as follows.
• User : Data before the execution of dedicated instructions is stored by user.
• System: Data after the execution of dedicated instruction is stored by CPU module.
2: Refer to Section 15.3 for error codes at abnormal completion.
[Functions]
(1) The "current feed value" of the axes to be set (See below) is set in the positioning
address or arc address.
The positioning data other than the positioning addresses and arc addresses are
set by peripheral device or using a sequence program.
• ZP.TEACH1: Axis 1
• ZP.TEACH2: Axis 2
• ZP.TEACH3: Axis 3
• ZP.TEACH4: Axis 4
(2) Teaching can be carried out for the positioning data No. 1 to 600.
(3) The movement of the machine to the address (position) set in the positioning
address/arc address of the positioning data is carried out by the JOG operation,
inching operation, or manual pulse generator operation.
(4) The ZP.TEACH instruction completion can be confirmed using the complete
devices ((D)+0) and ((D)+1).
(a) Complete device ((D)+0)
This device is turned ON by the END processing of the scan for which
ZP.TEACH instruction is completed, and turned OFF by the next END
processing.
(b) Complete state display device ((D)+1)
This device is turned ON and OFF according to the state in which
ZP.TEACH instruction is completed.
• When completed normally : Kept unchanged at OFF.
• When completed abnormally: This device is turned ON by the END
processing of the scan for which ZP.TEACH
instruction is completed, and turned OFF by
the next END processing. (same ON/OFF
operation as complete device).
Summary of Contents for Melsec-Q QD75D1
Page 1: ......
Page 2: ......
Page 22: ...A 20 MEMO ...
Page 24: ...MEMO ...
Page 41: ...1 17 MELSEC Q 1 PRODUCT OUTLINE MEMO ...
Page 48: ...1 24 MELSEC Q 1 PRODUCT OUTLINE MEMO ...
Page 60: ...2 12 MELSEC Q 2 SYSTEM CONFIGURATION MEMO ...
Page 137: ...5 33 MELSEC Q 5 DATA USED FOR POSITIONING CONTROL MEMO ...
Page 232: ...5 128 MELSEC Q 5 DATA USED FOR POSITIONING CONTROL MEMO ...
Page 252: ...6 20 MELSEC Q 6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL ...
Page 253: ...6 21 MELSEC Q 6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL ...
Page 278: ...6 46 MELSEC Q 6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL MEMO ...
Page 292: ...MEMO ...
Page 436: ...9 120 MELSEC Q 9 MAJOR POSITIONING CONTROL MEMO ...
Page 464: ...10 28 MELSEC Q 10 HIGH LEVEL POSITIONING CONTROL MEMO ...
Page 638: ...14 24 MELSEC Q 14 DEDICATED INSTRUCTIONS MEMO ...
Page 647: ...15 9 MELSEC Q 15 TROUBLESHOOTING MEMO ...
Page 686: ...15 48 MELSEC Q 15 TROUBLESHOOTING MEMO ...
Page 839: ...Appendix 153 MELSEC Q APPENDICES 6 QD75D4N 90 23 27 4 12 98 4 46 Unit mm ...
Page 840: ...Appendix 154 MELSEC Q APPENDICES 7 QD75P1 QD75P2 QD75P4 27 4 23 98 90 4 46 unit mm ...
Page 841: ...Appendix 155 MELSEC Q APPENDICES 8 QD75D1 QD75D2 QD75D4 27 4 23 90 12 98 4 46 unit mm ...
Page 842: ...Appendix 156 MELSEC Q APPENDICES MEMO ...
Page 857: ......
Page 858: ......







































































