





























8 - 7
MELSEC-Q
8 OPR CONTROL
8.2.3 OPR method (1): Near-point dog method
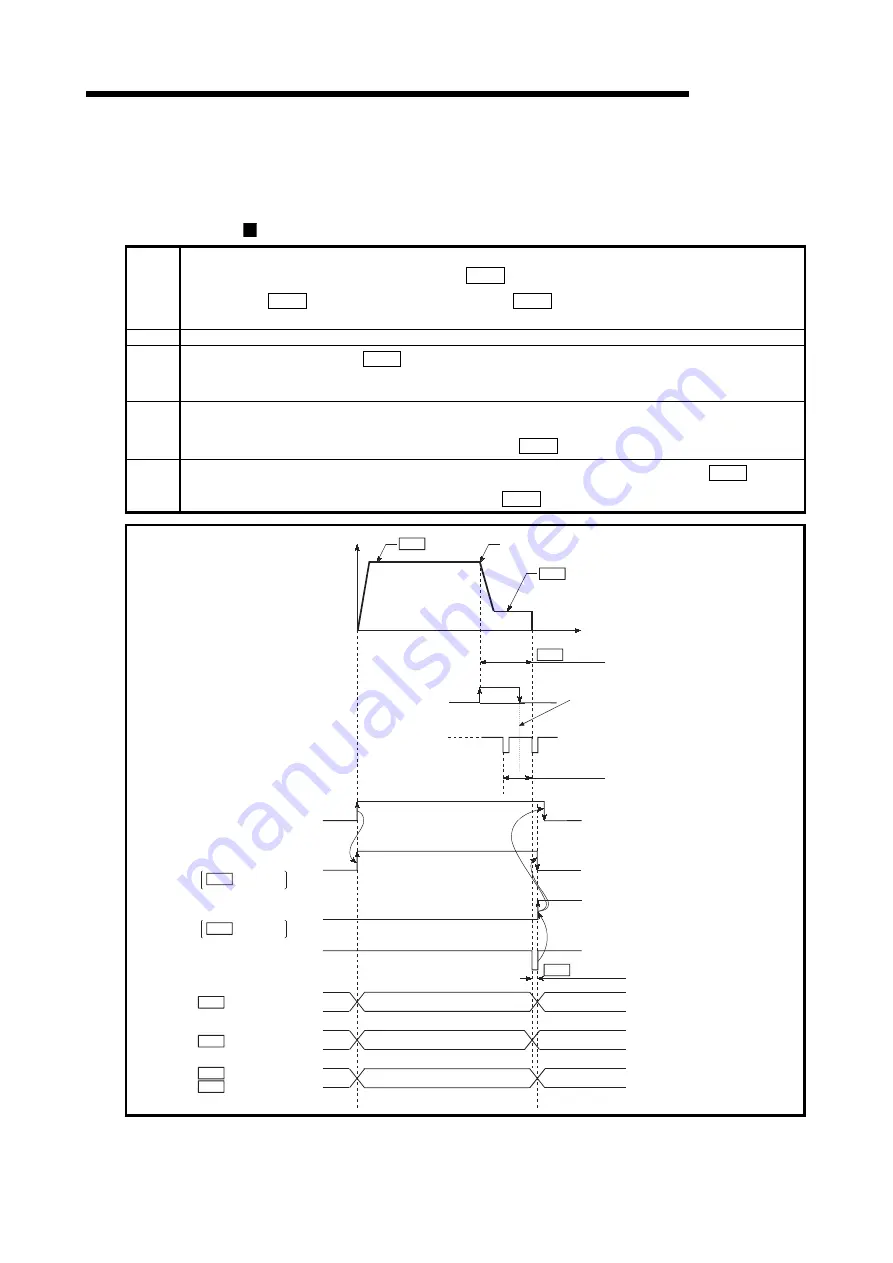
The following shows an operation outline of the "near-point dog method" OPR method.
Operation chart
1)
The machine OPR is started.
(The machine begins the acceleration designated in " Pr.51 OPR acceleration time selection", in the direction
designated in " Pr.44 OPR direction". It then moves at the " Pr.46 OPR speed" when the acceleration is
completed.)
2)
The machine begins decelerating when the near-point dog ON is detected.
3)
The machine decelerates to the " Pr.47 Creep speed", and subsequently moves at that speed.
(At this time, the near-point dog must be ON. The workpiece will continue decelerating and stop if the near-point dog is
OFF.)
4)
After the near-point dog turns OFF, the pulse output from the QD75 will stop at the first zero signal,
outputting a "deviation counter clear signal" to the drive unit.
(The "deviation counter clear signal output time" is set in
Pr.55
.)
5)
After a "deviation counter clear signal" is output to the drive unit, the OPR complete flag (
Md.31
Status:
b4) turns from OFF to ON and the OPR request flag (
Md.31
Status: b3) turns from ON to OFF.
t
ON
OFF
OPR speed
Deceleration at the near-point dog ON
Creep speed
ON
OFF
OFF
ON
Standby
OPR
Standby
Inconsistent
0
Movement amount after
near-point dog ON
Inconsistent
Value of the machine moved is stored.
OP address
Current feed value
V
Zero signal
Value of *1
Deviation counter clear output
Movement amount after
near-point dog ON
Near-point dog
ON
OFF
One servomotor rotation
*
1
OPR request flag
OPR complete flag
Md.34
1)
2)
3)
4) 5)
Pr.46
Pr.47
Md.34
Md.20
Md.21
Md.26
Md.31
Md.31
Pr.55
Machine feed value
Adjust so the near-point dog OFF
position is as close as possible to
the center of the zero signal HIGH level.
If the near-point dog OFF position
overlaps with the zero signal, the
machine OPR stop position may
deviate by one servomotor rotation.
Machine OPR start
(Positioning start signal)
[Y10,Y11,Y12,Y13]
Status: b3
Status: b4
Axis operation status
Deviation counter clear
signal output time
Fig. 8.2 Near-point dog method machine OPR
Summary of Contents for Melsec-Q QD75D1
Page 1: ......
Page 2: ......
Page 22: ...A 20 MEMO ...
Page 24: ...MEMO ...
Page 41: ...1 17 MELSEC Q 1 PRODUCT OUTLINE MEMO ...
Page 48: ...1 24 MELSEC Q 1 PRODUCT OUTLINE MEMO ...
Page 60: ...2 12 MELSEC Q 2 SYSTEM CONFIGURATION MEMO ...
Page 137: ...5 33 MELSEC Q 5 DATA USED FOR POSITIONING CONTROL MEMO ...
Page 232: ...5 128 MELSEC Q 5 DATA USED FOR POSITIONING CONTROL MEMO ...
Page 252: ...6 20 MELSEC Q 6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL ...
Page 253: ...6 21 MELSEC Q 6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL ...
Page 278: ...6 46 MELSEC Q 6 SEQUENCE PROGRAM USED FOR POSITIONING CONTROL MEMO ...
Page 292: ...MEMO ...
Page 436: ...9 120 MELSEC Q 9 MAJOR POSITIONING CONTROL MEMO ...
Page 464: ...10 28 MELSEC Q 10 HIGH LEVEL POSITIONING CONTROL MEMO ...
Page 638: ...14 24 MELSEC Q 14 DEDICATED INSTRUCTIONS MEMO ...
Page 647: ...15 9 MELSEC Q 15 TROUBLESHOOTING MEMO ...
Page 686: ...15 48 MELSEC Q 15 TROUBLESHOOTING MEMO ...
Page 839: ...Appendix 153 MELSEC Q APPENDICES 6 QD75D4N 90 23 27 4 12 98 4 46 Unit mm ...
Page 840: ...Appendix 154 MELSEC Q APPENDICES 7 QD75P1 QD75P2 QD75P4 27 4 23 98 90 4 46 unit mm ...
Page 841: ...Appendix 155 MELSEC Q APPENDICES 8 QD75D1 QD75D2 QD75D4 27 4 23 90 12 98 4 46 unit mm ...
Page 842: ...Appendix 156 MELSEC Q APPENDICES MEMO ...
Page 857: ......
Page 858: ......