





























System Manual – MOVIDRIVE® compact Drive Inverters
177
3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
Operating modes
Parameters
VFC n-control &
Group
VFC n-control & group (only with MCV, MCH) in parameter set 1 only.
Set this mode if a group of asynchronous motors is to be operated on one inverter. All
motors of the group must have the same rated voltage, rated frequency and rated pow-
er. One motor of the group must be operated with speed control and be equipped with
an incremental encoder that is connected to X15. The other motors of the group follow
the speed controlled motor depending on the slip. The following encoders can be used
as incremental encoder:
•
Hiperface
®
encoder
•
TTL sensors with negated tracks, encoders with signal level to RS422
•
High-resolution incremental encoder with sine shaped tracks 1 V
SS
SEW-EURODRIVE recommends the use of encoders with 1,024 increments/revolution.
The startup function of SHELL not only supports motor startup (VFC) but also the addi-
tional controller setting of the speed controller. The following parameters relevant for n-
control are set:
Setting the parameter P820 4-quadrant operation 1 will be ignored; 4-quadrant opera-
tion is always active.
VFC n-control &
IPOS
VFC n-control & IPOS (only with MCV, MCH) in parameter set 1 only.
Must be set if IPOS
plus®
positioning commands are to be processed. Refer to the
"IPOS
plus®
Positioning and Sequence Control System" manual for detailed descriptions
of IPOS
plus
. This manual can be obtained from SEW-EURODRIVE.
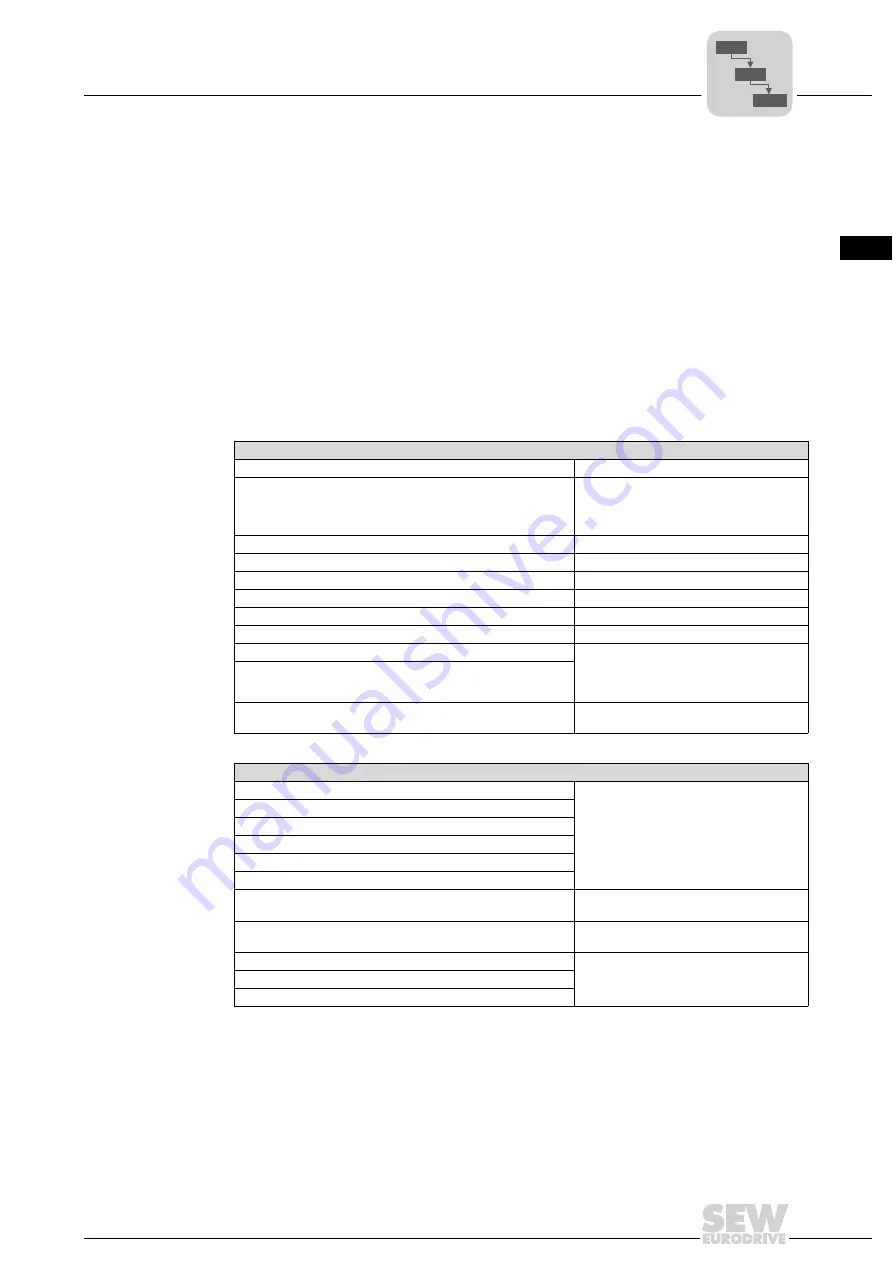
Settings after the startup function
I
max
(inverter) = 150 %
Σ
I
N_mot
Depends on number of poles and rated
motor frequency
e. g. 2 pole / 50 Hz -> 3000 1/min
e. g. 4 pole / 60 Hz -> 1800 1/min
0 1/min
MOTOR & REGENERATIVE
0.1 s
UNIPOL./FIX.SETPOINT
TERMINALS
ON
For SEW motors: Setting in accordance
with motor data.
For non-SEW motors: Set the correct
value manually!
Setting in accordance with specified motor
data
Settings after the startup function of the speed controller
Setting in accordance with specified data
P201 Time constant n-controller
P202 Gain acceleration feedforward
P204 Filter speed actual value
P203 Filter acceleration feedforward
Position controller gain for the hold control
function
Position controller gain for IPOS
plus®
(positioning mode)
Setting in accordance with specified data
P6..
P60.
P600
Summary of Contents for MOVIDRIVE compact MCH41A
Page 2: ...SEW EURODRIVE Driving the world...
Page 432: ......







































































