





























54
System Manual – MOVIDRIVE® compact Drive Inverters
2
MOVIDRIVE® compact MCH electronics data
Technical Data and Dimension Drawings
MOVIDRIVE
®
compact
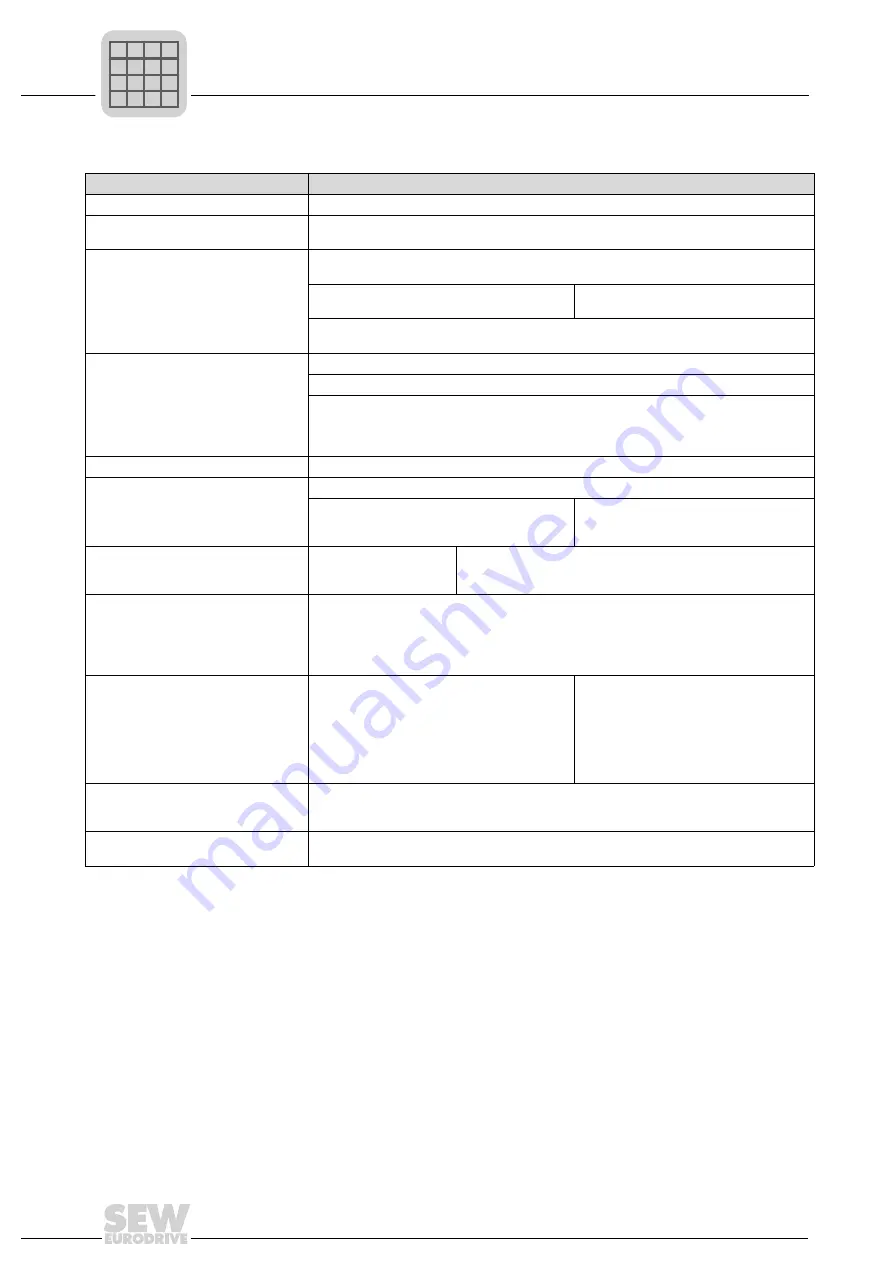
Additional electronics data
Auxiliary voltage output
1)
X11:8
VO24: V
OUT
= DC 24 V, maximum current carrying capacity I
max
= DC 200 mA
Ext. voltage supply
1)
X12:6
VI24: V
IN
= DC 24 V –15 % / +20 % to EN 61131-2
Binary inputs
X11:1...X11:6
Internal resistance
DIØØ...DIØ5: Isolated (optocoupler), PLC-compatible (EN 61131), sampling interval 5 ms
R
i
≈
3 k
Ω
, I
E
≈
10 mA
Signal level
DC (+13 V...+30 V) = "1" = Contact closed
DC (–3 V...+5 V) = "0" = Contact open
Complies with EN 61131
Function
X11:1
X11:2...X11:6
DIØØ: fixed assignment with "/Controller inhibit"
DIØ1...DIØ5: Selection option
→
parameter menu P60_
Binary outputs
1)
X12:1/X12:5
DBØØ/DOØ2: PLC-compatible (EN 61131-2), response time 5 ms
Signal level
"0" = 0 V
"1" = +24 V
Important: Do not apply external voltage!
Function
X12:1
X12:5
DBØØ: With fixed assignment "/Brake", I
max
= DC 150 mA (short-circuit proof,
protected against external voltage up to DC 30 V)
DOØ2: Selection option
→
parameter menu P62_, I
max
= DC 50 mA (short-circuit proof and
protected against external voltage up to DC 30 V)
Analog output
X12:5
AOØ1:
→
Menu P64_, resolution 8 bit, I
max
= DC 20 mA (short-circuit proof)
Relay output
X12:2/3/4
DOØ1: Load capacity of the relay contacts U
max
= DC 30 V, I
max
=DC 800 mA
Function
X12:2
X12:3
X12:4
DOØ1-C: Shared relay contact
DOØ1-NO: Normally open contact
DOØ1-NC: Normally closed contact
Selection option
→
parameter menu P62_
Systembus (SBus)
X10:7/10
X10:8/11
SC11/21: SBus high
SC12/22: SBus low
CAN bus to CAN specification 2.0, parts A and B, transmission
technology to ISO 11898, max. 64 stations, terminating resistor
(120
Ω
) can be activated using DIP switch.
Input motor encoder
1)
X15:
Permitted encoder types:
•
Hiperface encoder
•
sin/cos encoder AC 1 V
SS
•
TTL sensor
Encoder power supply: DC + 12 V, I
max
= DC 180 mA
Output for incremental encoder X14:
simulation or
external encoder input
1)
Output for incremental encoder simulation:
Signal level to RS422
The number of pulses is:
•
1024 pulses/revolution (Hiperface
®
encoder
on X15)
•
as at X15: Motor encoder input (sin/cos
encoder or TTL sensor on X15)
External encoder input (max. 200 kHz):
Permitted encoder types:
•
Hiperface encoder
•
sin/cos encoder AC 1 V
SS
•
TTL sensor
Encoder power supply: DC+12 V,
I
max
= DC 180 mA
Reference terminals
X10:5
X10:9/X11:9/X12:7
X11:7
AGND: Reference potential for analog signals n1 and n2 and terminals X10:1 and X10:6.
DGND: Reference potential for binary signals, system bus (SBus), encoder and resolver.
DCOM: Reference potential for binary inputs X10:9...X10:14 (DIØØ...DIØ5).
Permitted line cross section
Only one core per terminal:
0.20...1.5 mm
2
(AWG 24...16)
Use right-angled crimping pliers with 1.5 mm
2
(AWG 16)
1)
MCH40A (without fieldbus): The unit provides a current of I
max
= DC 400 mA for the DC+24 V outputs (VO24, DBØØ, DOØ2,
encoder supply). If this value is insufficient, a DC 24 V voltage supply must be connected to X10:24 (VI24). This external
DC 24 V voltage supply must be able to provide 50 W continuous power and 100 W peak power (1 s).
MCH41A (with PROFIBUS-DP) or MCH42A (with INTERBUS-LWL): SEW-EURODRIVE recommends that you always
supply these units with DC 24 V at terminal X10:24 (VI24). This external DC 24 V voltage supply must be able to provide 50 W
continuous power and 100 W peak power (1 s).
The DC 24 V outputs X10:16 (VO24), X10:21 (DBØØ) and X10:19 (DOØ2) may be supplied with a total maximum current of
I
max
= DC 400 mA.
P
i
f
kVA
Hz
n
Summary of Contents for MOVIDRIVE compact MCH41A
Page 2: ...SEW EURODRIVE Driving the world...
Page 432: ......







































































