





























12.
Configure
User type
:
Server
. Make sure the TCP/IP port is set to a
port listed as open in your APN profile.
Configure, how many clients can connect to this port simultaneously
to allow up to ten rovers to connect to a base RTK port.
13.
You can now receive RTK correction data from your base using the
host name and the configured RTK port.
•
Tap on in the icon bar. Select
Internet status
. Check that DynDNS sta-
tus is shown as
On
. Check that the currently registered IP address is cor-
rect.
•
Everything is fine, but you do not get data from the port that you config-
ured for your data stream? Use the DynDNS tool
http://www.dyndns.com/support/tools/openport.html and enter the IP
address of your GS. You can find the IP address as described above. Enter
the port you are trying to connect to. The tool tells you if this port is open.
If not, change your data stream setting to a different port.
18.3
GS rover / GS base
To connect the field controller to the sensor (antenna) either on the base or
on the rover side.
☞
For CS35, the setting for
Sensor
can be selected. Only Bluetooth con-
nections can be used. The Bluetooth connection itself must be config-
ured in Windows.
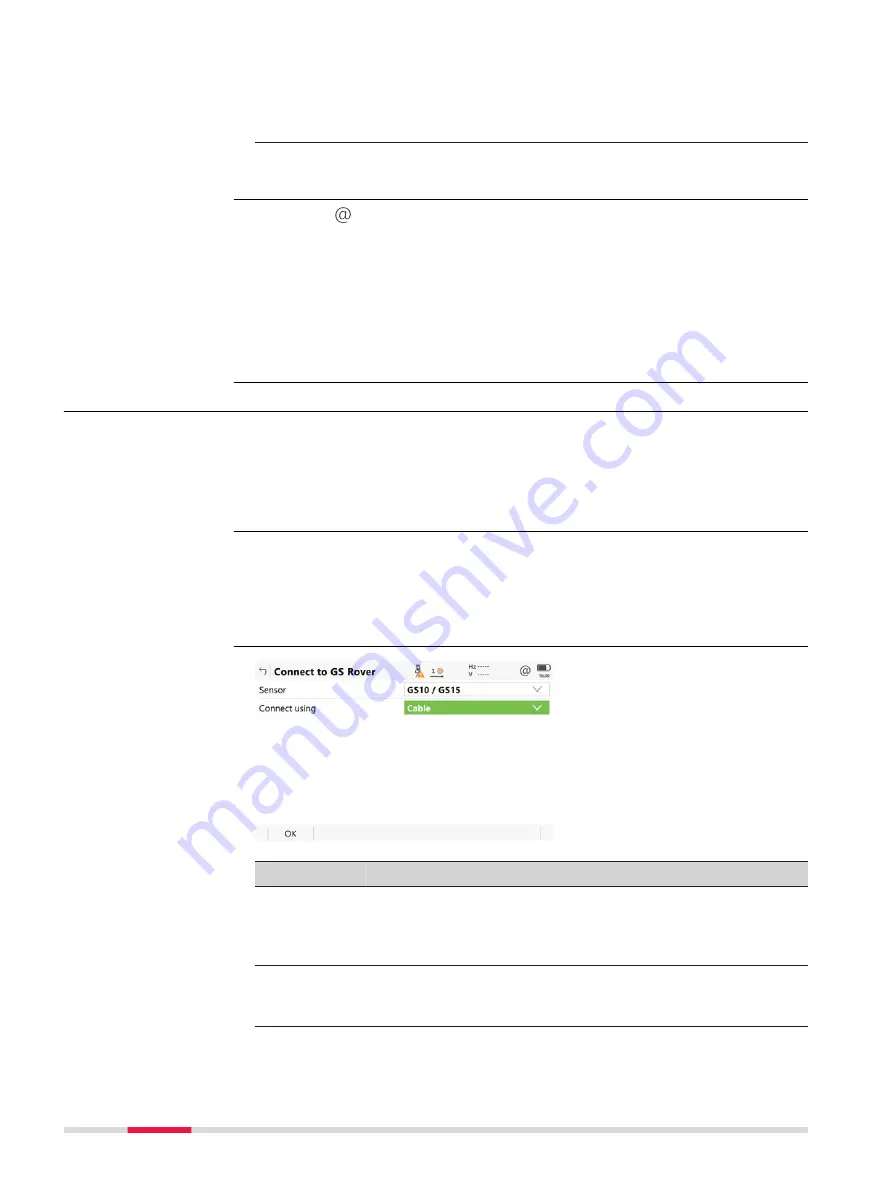
For RTK rover:
•
In
Connection Settings
,
CS connections
page, highlight
GS rover
.
Edit
.
For RTK base:
•
In
Base Connection Settings
, select
GS base
.
Edit
.
Key
Description
OK
To accept changes and return to the panel from where this
panel was accessed.
When you change the sensor type, shut down Leica Capti-
vate. Restart Leica Captivate before using the sensor.
Search
To search for all available Bluetooth devices. If more than
one Bluetooth device is found a list of available devices is
provided. Available for GS with
Connect using: Bluetooth
.
Troubleshooting
Description
Access
Connect to GS Rover /
Connect to GS Base
176
Connections - All other connections